
Основы коптеростроения. Григорий Колодяжный, Пятигорск.

Всем привет! После выхода первого же ролика, снятого с собранного мной гексакоптера, народ стал одолевать вопросами и просьбами помочь в постройке аппарата.
В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать.

Хочу в своей статье ответить на те вопросы, которые поступают практически каждый день от моих знакомых.
А именно:
— Какой коптер лучше и чем они отличаются? (квадро-, три-, гекса-, октакоптер)
— Купить готовый, или собрать самому?
— Какие комплектующие подобрать? Как рассчитывать? Каков минимальный набор для полёта?
— На что снимать – на GoPro или камеру потяжелее?
Думаю, что для начала этих вопросов хватит, чтобы заставить закипеть мозг тех, в чьих головах пока есть только желание разобраться с основами, но нет опыта за плечами.
Прошу не принимать всё написанное за единственно верную истину. Как раз хочу объяснить, что я человек с творческо-техническим складом ума, но не живу в своем ограниченном мире коптеростроения. Напротив, я новичок в этом вопросе и пишу статью потому, что загоревшись желанием построить дрона для аэросъемки, столкнулся с тем, что очень много разных мнений и выбрать верный путь очень сложно. Мой первый опыт был не совсем удачным, от этого и хочу всех уберечь, выделив самое важное и акцентируя внимание на важные детали, о которых мало говорят.
Итак, чем же отличаются коптеры и откуда такие названия? Квадрокоптер – это четырехвинтовой аппарат. Этот тип БПЛА (беспилотных летательных аппаратов) на сегодняшний день является самым распространенным и уже фактически стал именем нарицательным для народа, если речь идет о мультироторных системах. Самый известный четырехмоторный дрон выпустила компания DJI, практически все о нем слышали. Это тот самый Phantom. Но разбирать все модификации бессмысленно. Единственное, я надеюсь, что после прочтения этой статьи вы сами сможете просчитать параметры и понять, почему полетное время между первым и вторым поколениями Phantom’ов изменилось почти вдвое.
Гексакоптер — это шестимоторный, а октакоптер, соответственно, восьмимоторный аппарат. Есть еще трикоптеры и так называемые соосные. И тут много споров на тему, как правильно назвать аппарат с 8-мью моторами, но 4-мя лучами, соосный квадрокоптер или всё-таки октакоптер. Моторы располагаются на одной оси один над другим. У такого расположения есть одно преимущество — размеры. Но на практике те же 8 моторов на октакоптере будут давать более высокий КПД, чем установка на одной оси парных двигателей.
Как вы понимаете, вся разница в количестве винтов, сказывается в первую очередь на подъемной силе и стабильности аппарата. То есть логично, что при всех равных условиях маленькому квадрокоптеру будет сопротивляться с ветром намного сложнее, чем большому октакоптеру. Во-первых, больший вес сложнее сдвинуть с места, во-вторых, большая длина рычага (луча рамы, на конце которой установлен мотор с пропеллером) говорит о том, что один и тот же порыв ветра способен накренить аппарат большего размера на меньший угол относительно горизонта. Следовательно, многомоторные системы более устойчивы к худшим погодным условиям.
Хочу коснуться еще одной темы — основ понимания физики поведения мультикоптеров. Эти аппараты управляются легче, чем любые другие летающие модели: самолёты, вертолёты, планеры и т.д. Для полётов коптера необходимо минимум 4 канала аппаратуры управления.
1 канал — Элероны (aileron) — это канал, который отвечает за направление влево-вправо.
2 канал — Элеватор (elevator) — это канал, отвечающий за движение вперед-назад.
3 канал — Газ (throttle) — это канал газа. Отвечает за набор и снижение высоты.
4 канал — Рысканье (rudder) – отвечает за вращение вокруг своей оси.
Остальные каналы в аппаратуре (моделисты любят использовать слово «аппа»- это тот самый пульт-передатчик в руках «пилота» и приемник на борту аппарата) используются для управления осями подвеса камеры, для складывания шасси, надстройки уровня чувствительности аппарата к внешним условиям (PID параметры в полётном контроллере, отвечающие за силу и скорость реакции коптера на сигналы управления, сопротивление погодным условиям), для переключения режимов полёта (к примеру GPS, Attitude, Manual, Failsafe, Home lock, Course Lock). Как говорят опытные авиамоделисты, много каналов не бывает, поэтому у них есть одно важное правило – покупать сразу хорошую надёжную аппу известных брендов. Лучшими считаются производители: Futaba, Spectrum, JR.

Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки.
Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Одна и та же хорошая аппаратура способна хранить в себе настройки одновременно десятков моделей. То есть, однажды приобретая её, можно пользоваться ею фактически всю жизнь и управлять RC самолётами, вертолётами, машинами, мультикоптерами, просто выбирая в меню аппаратуры нужную модель (но закладывать настройки каждой модели нужно самому вручную). Так вот, для чего же на практике люди используют дополнительные каналы? Если вы планируете заниматься аэросъемкой, то минимум 2 канала нужно на управление трех-осевым подвесом – канал YAW отвечает за рысканье (поворот вокруг своей вертикальной оси, горизонтальное панорамирование), PITCH – канал тангажа, то есть наклон камеры вверх\вниз. Как правило наклон оси ROLL (горизонта) регулировать не нужно, так как сложно придумать ситуацию, когда на видео нужно нарочно завалить горизонт. Иногда люди используют дополнительную курсовую камеру на сервоприводах, которой вообще можно управлять движениями головы. Лично я реализовал такое управление своим подвесом с камерой GoPro, которая одновременно является и курсовой и основной камерой. Для этого устанавливается датчик head tracker в видео очки или FPV-шлем (First person view – вид от первого лица), который соединяется с аппаратурой управления, а та в свою очередь передает сигналы на каналы управления нужных осей подвеса камеры. Для дополнительных каналов управления также можно придумать другие предназначения: от сброса транспортируемых коптером предметов до поджигания фитиля установленных на него ракетниц-фейерверков, тут всё ограничивается лишь полётом фантазии.
_
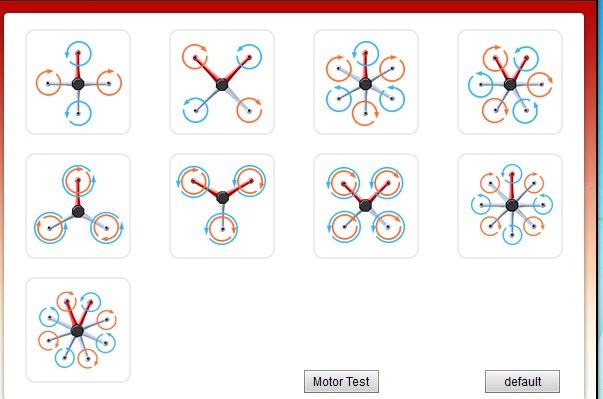
Еще важно разобраться с тем, как мультикоптер работает в целом. Понятно, что при движении стика газа вверх на аппаратуре управления, коптер просто прибавляет обороты на всех двигателях и происходит набор высоты. Чтобы полететь вбок, аппарат кренится в нужную сторону, увеличивая обороты двигателей с одной стороны и снижая с другой. При этом, за счет датчиков, соединенных с ПК (полётным контроллером), аппарат кренится только до ограниченного в прошивке контроллера угла, чтобы не перевернуться. Вперед и назад летает, соответственно, тем же принципом. А вот вращение вокруг своей оси происходит за счет того, что двигатели через один крутятся в противоположные стороны и пропеллеры должны быть соответствующие — одни загребают воздух под себя, вращаясь по часовой стрелке, другие — против. Получается, чтобы аппарат развернулся в нужную нам сторону, он увеличивает обороты двигателей вращающихся в одну сторону и ровно настолько же уменьшает обороты двигателей, вращающихся в противоположную.
_
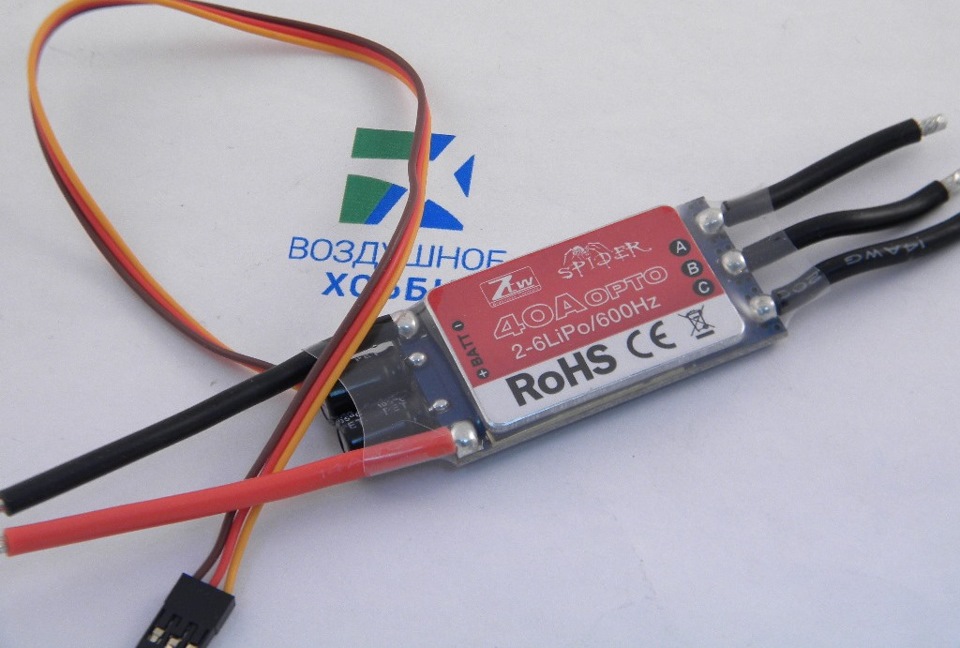
Что касается «начинки», то мультикоптер состоит из рамы, на которую устанавливаются двигатели. Сигналы на вращение двигателей идут из полётного контроллера (ПК), но мощности этих сигналов не достаточно, поэтому перед каждым двигателем стоит регулятор оборотов (в простонародье «регуль», ESC).
Также на борту стоит приемник сигналов управления, который передает их в ПК.

Современные полётные контроллеры такие, как распространенный DJI Naza-m v2 представляют собой целые наборы.

Контроллер уже включает в себя виброразвязку, поэтому его не нужно ставить на демпферную площадку, а нужно крепить прямо на корпус. Также у него на борту находится гироскопический, барометрический датчики, магнитометр, компас и дополнительно подключается модуль GPS, чтобы аппарат мог вернуться на точку взлета сам, если потеряет связь с аппаратурой управления, но это не единственная функция. К данному полётному контроллеру в комплекте идет модуль PMU и LED, а также может подключаться модуль bluetooth и OSD телеметрия. Также на борту стоит батарея, питающая всю систему и может стоять дополнительная батарея для приемника аппаратуры управления. Данный полётный контроллер установлен в современных квадрокоптерах DJI Phantom 2, но его возможности намного шире рамок этого небольшого аппарата.
Выше перечислен минимальный набор, который можно назвать мультикоптером. Он может взлететь, если имеется «аппа», но этого не достаточно для съемок. Пишу это к тому, что многие, узнав бюджет на весь мой аппарат с камерой и дополнительным оборудованием, удивляются и спрашивают, почему я не купил за эту сумму готовый более серьезный аппарат. Ответ в том, что дополнительное оборудование для управления, съемки, стабилизации и контроля стоит намного больше, чем сам мультикоптер.
И всё-таки, собрать самому, или купить готовый? На этот вопрос вы ответите сами себе, прочитав всю статью и осознав все за и против. Многие, как я уже написал, критикуют меня в том, что я потратил большую сумму на сборку аппарата, который фактически умеет то же самое, что DJI Phantom 2. Сумма со всеми допами подбирается к 200 тысячам рублей. Но сюда входит и стоимость аппаратуры управления Futaba 10J с заводским режимом мультикоптеров, в паре с родным передатчиком работающей до 4 км и имеющей очень надежную помехоустойчивость. Сюда же вошла и камера GoPro 4 black, подвес Fy-G3, очень мощный FPV-передатчик и приемник на 1000 мВатт 1,2 Ггц с изготовленными под заказ клеверными антеннами, покрывающими расстояние до 12 км и фильтром, чтобы срезать частоты, наиболее влияющие на аппаратуру управления, чтобы не забить ненароком сигнал приемника. Также в этой сумме FPV-видеошлем eYebox с потрясающей цветопередачей, детализацией и углом обзора (а до него были очки Fatshark BASE SD, которые мне не понравились в сравнении со шлемом и я решил их продать).
Говоря о вопросе покупки готового собранного аппарата – можно однозначно ответить – покупайте проверенные, если Вы планируете использовать их только для того, для чего они созданы. То есть если Phantom 2 создан, чтобы поднимать GoPro, вы не повесите на него зеркалку, вы не увеличите время его полёта, из него выжат максимум очень грамотными специалистами.
Собирать коптер самостоятельно – это выбор тех, кому нравится решать сложные задачи. То есть для людей, которые получают удовольствие от самого процесса расчетов и сборки. Преимущества собранного своими руками аппарата в том, что он подлежит апгрейду, на него можно вешать любое дополнительное оборудование. Но важно понимать, что аппарат изначально рассчитывается под определенный полётный вес, время полёта. А вот, так сказать, запас тяги может привести к плачевным последствиям.
Конфигурация моего нынешнего гексакоптера такова:
1. Рама: Tarot fy-680.
2. Контроллер: dji naza-m v2 c gps.
3. Моторы: sunnysky v3508 kv580
4. Регуляторы: Hobbywing Platinum PRO 30A OPTO ESC(2-6s).
5. Пропеллеры: карбон 1255.
6. Батареи: lipo 4S turnigy 5000 mah 30-45C и 8000 mah 20-30 C (вес 500 и 800 грамм).
7. Аппаратура управления и приемник: Futaba 10J.
8. Подвес для gopro3 : Feiyu Tech fy G3 gimbal.
9. OSD телеметрия DJI iOSD mini.
10. BAC трансформатор с выводом на 5V для подпитывания камеры во время полёта.
Снаряженный вес без батареи 2600 грамм.
Изначально была немного иная конфигурация. Аппарат летал на батареях 3S, двигателях sunnysky 2216 kv800 и пропеллерах 1045 и 1238 (но на 1238, которые прислал продавец по ошибке, аппарат разбился).
Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели.
1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить.
2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580
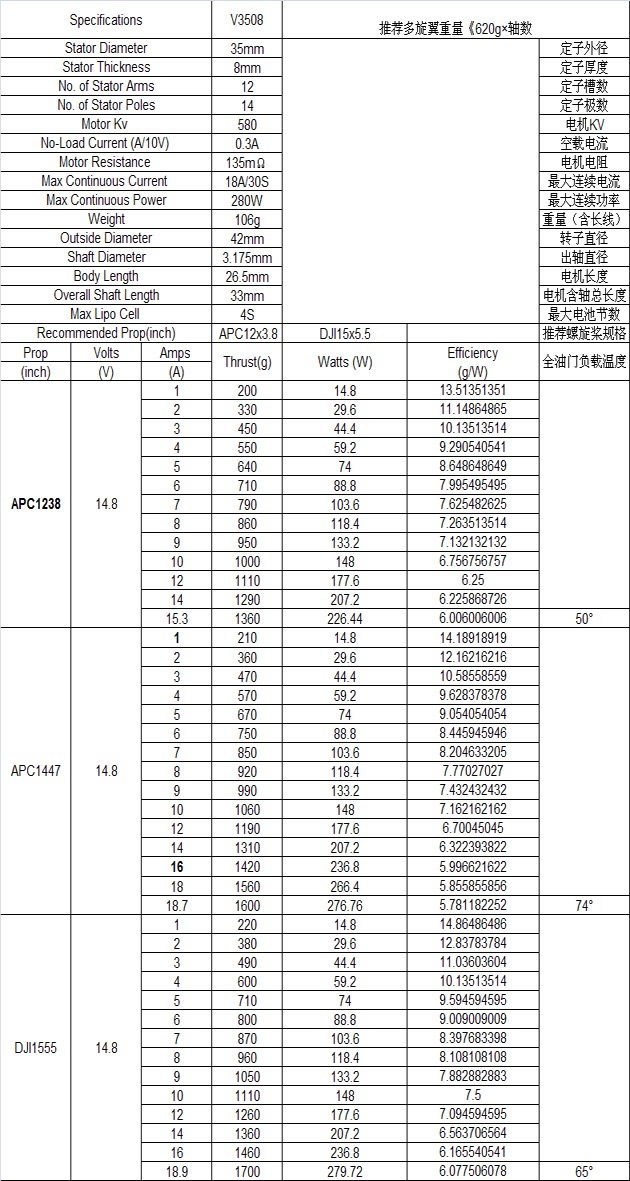
И тут хочу акцентировать внимание на параметры мотора. В названии мотора зашифрованы его основные параметры V3508 kv580, где v — это серия, 35мм — диаметр статора, 8 мм — это длина статора. А параметр KV говорит об оптимальных для данного мотора оборотах висения летательного аппарата. То есть, имея оптимальные обороты висения и вес аппарата, нам придется под них подбирать пропеллеры с нужными параметрами, чтобы добиться оптимальных показателей. В таблице видно, что для данных моторов производителем рекомендуются 3 вида пропеллеров: 1238, 1447 и 1555. Во втором столбце видим, что везде значение напряжения стоит 14.8 вольт. То есть данные моторы используются только с 4S батареями. Для одних и тех же моторов в таблице могут даваться показания для разного вольтажа, и нужно быть очень внимательным, ведь моторы, которые работают и с 11.1 вольтовыми 3S батареями и с 14.8 вольтовыми 4S батареями, как правило, допускают максимальный размер пропеллеров при 3S батареях меньше, чем при 4S, так как мотору может просто не хватить мощности раскручивать тяжелые для него пропеллеры, и есть вероятность перевернуть коптер вверх ногами прямо в полёте. (Со мной такое случалось). Вот пример таблицы для моторов SunnySky 2216 kv800
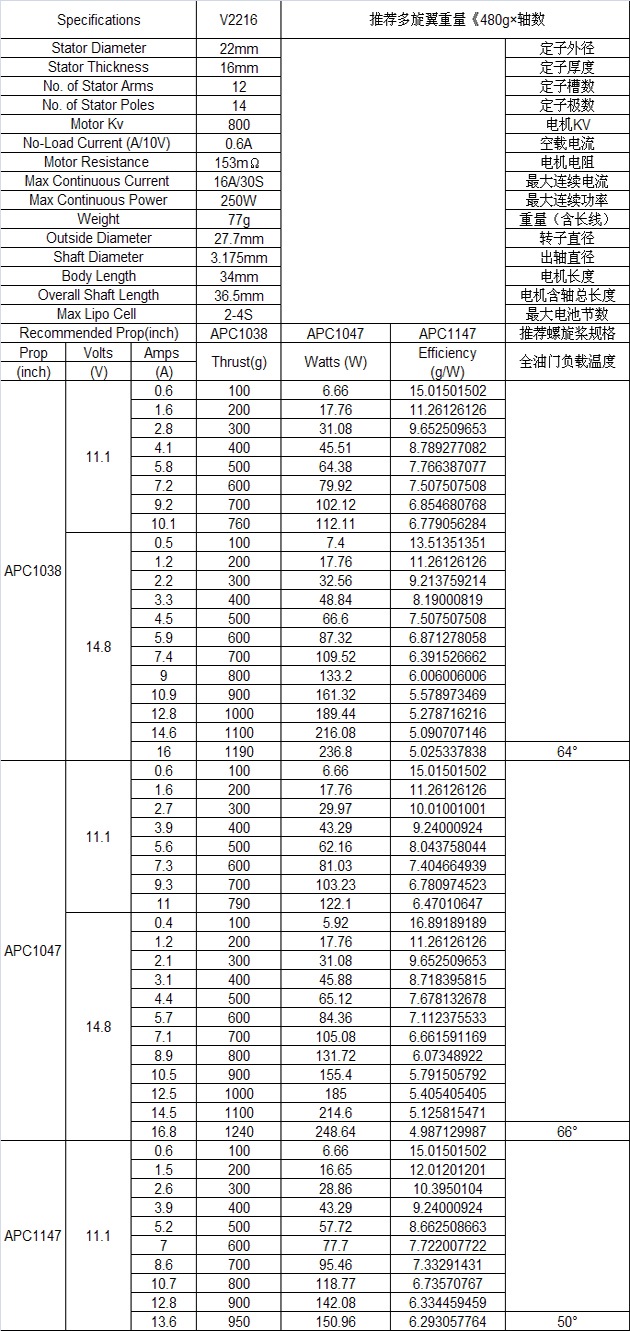
Из этой таблицы видно, что с моторами 2216 при использовании 11.1 вольтовых батарей можно ставить пропеллеры максимального размера 1147, а при 14.8 вольтовых максимум 1047-е пропеллеры. Теперь, чтобы сложить картину воедино, следует пояснить маркировку пропеллеров. На самом деле, размер обозначает только первое двузначное число, а второе означает шаг. Размеры даются в дюймах. Маркировка 1047 означает, что пропеллеры 10-тидюймовые, а шаг на один оборот составляет 4,7 дюйма.
Выше я уже привел ссылку на видео случая из моей первой конфигурации, когда я на моторы 2216 kv800 установил пропеллеры 1238. На видео с 17й секунды видно, что при снижении, либо порыве ветра аппарат начинает амплитудно раскачиваться. Закончилось это тем, что коптер перевернулся в воздухе и приземлился вверх ногами на асфальт. Во-первых, моторы перегреваются и могут вообще перегореть в полёте, во-вторых, у них банально не хватает силы резко раскручивать нужные пропеллеры для стабилизации положения коптера, в итоге аппарат себя раскачивает все сильнее и сильнее.
Также, прежде чем перейти к этапу расчетов, важно пополнить свои знания информацией о литий-полимерных батареях. Они встречаются сейчас повсеместно — в телефонах, планшетных компьютерах, ноутбуках и других устройствах. Эти батареи имеют максимальную ёмкость относительно веса и максимальную токоотдачу, минимальное время заряда. Но при этом батареи токсичны и даже взрывоопасны.
Они непременно взрываются при сильном механическом повреждении, при чрезмерном перезаряде, при замыкании. Эту информацию важно знать и тем, кто не планирует собирать себе коптер.
Li-Po батареи нужно заряжать, транспортировать и хранить в специальных огнеупорных конвертах.

Теперь давайте разберем параметры в описании батареи.

К примеру :
ONBO 5200mAh 4S 45C Lipo Pack:
• Емкость: 5200mAh
• Напряжение: 4S1P / 4 Cell / 14.8V
• Ток разряда: 45C продолжительный / 90C пиковый
• Вес: 485г (включая провода, разъемы и корпус)
• Размеры: 160x50x32мм
• Балансировочный разъем: JST-XH
• Силовой разъем: T-connector
Что же означают эти 2S, 3S, 4S? 6S и на что они влияют?
Параметр S означает количество ячеек, либо банок. Каждая ячейка представляет собой отдельную батарею указанной ёмкости, но её номинальное напряжение 3.7 вольта, а напряжение полностью заряженной ячейки составляет 4.2 вольта. Поэтому номинальное и полное напряжение 2S аккумулятора составляет 7,4-8,4 вольта, 3S – 11,1-12,6 вольт, 4S – 14,8-16,8 вольт и т. д.
У аккумулятора имеется балансировочный разъем, к которому можно подключить индикатор напряженияи следить как за общим уровнем заряда батареи, так и за уровнем заряда в каждой ячейке.

Подобный индикатор настраивается на определенный уровень напряжения, по достижении которого на любой из ячеек он начинает сигнализировать громким писком. Это очень удобно, если отправлять аппарат в полёт с подключенным устройством, которое настроено на 3,4 вольта. Чтобы знать, что пора приземлять коптер. Ведь важно знать, что порог, до которого можно разряжать Li-Po аккумулятор, чтобы он прослужил долгое время, составляет 3.3 вольта на банку. При полной разрядке аккумулятора, он теряет значительную часть своей ёмкости.
А для правильной его зарядки требуется специальное зарядное устройство, которое умеет балансировать ячейки до равного напряжения и при этом не перезаряжать, чтобы не допустить возгорания.

Подобная зарядка также способна заряжать (либо разряжать) до номинального напряжения для хранения батарей, ведь хранение полностью заряженных батарей тоже негативно сказывается на их ресурсе.
Возвращаясь к описанию параметров батарей, хочу разобрать параметр “C” – обычно встречаются цифры 10C, 20C, 30C и т. д. Данный параметр равен ёмкости элемента. Грубо говоря, 1С — 5000 mah составляет 5A за 1 час, а если батарея с током разряда 20C, то она способна полностью отдать свой заряд в 20 раз быстрее часа, то есть за 3 минуты. Но в то же время рекомендуемый ток заряда для большинства батарей не должен превышать 1С. Но значение максимального тока заряда указывается в описании к каждой батарее. Тем не менее, более качественный и щадящий заряд идет именно током 1С – то есть, если емкость батареи 2000 mah, то заряжать её желательно током не более 2 ампер. А если емкость батареи 4000 mah, то тот же 1С для такой батареи уже составит 4 ампера.
Если вы осилили всю эту теорию, переходим к самому интересному. Давайте научимся пользоваться калькулятором для расчета мультикоптеров.
Скажу сразу, он «буржуйский», поэтому просит внести лепту. Но мы- россияне, поэтому есть легальный способ пользоваться всеми функциями сего ресурса без финансовых вложений. Заключается он в перезагрузке сайта, если не находите в списке нужных двигателей или аккумуляторов в базе. При каждом заходе база обновляется. Но могу добавить, что многие двигатели являются аналогами, поэтому можно подобрать двигатель другого производителя с такими –же размерами и параметром KV.
Вот пример моей конфигурации в полном снаряжении:
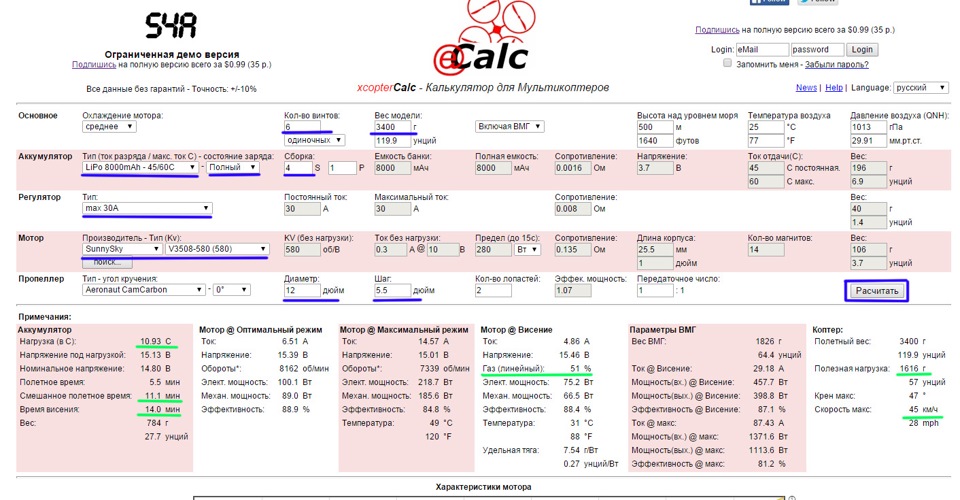
Синим я пометил параметры, которые менял в таблице с параметров по умолчанию после загрузки страницы, а зеленым – наиболее важные строки, на которые стоит обращать особое внимание при расчетах. Как видно, газ висения подобран практически идеально. Для полётного контроллера naza желательно подбирать значения в пределах от 40% до 60%. Газ висения не означает, что если вы оставите стик газа на управлении ровно посередине, мультикоптер начнет подниматься при переизбытке тяги, или опускаться при её недостатке. Нет, на самом деле полётный контроллер сам регулирует обороты двигателя, для того, чтобы оставаться на заданной высоте при положении стика газа ровно посередине. Но если газ висения будет более 60%, значит аппарат перегружен, нужно пробовать пропеллеры с большим шагом, либо большего размера (если это позволяет рама и характеристики двигателей).
Для примера я посчитал эту же конфигурацию, если установить пропеллеры 1447.
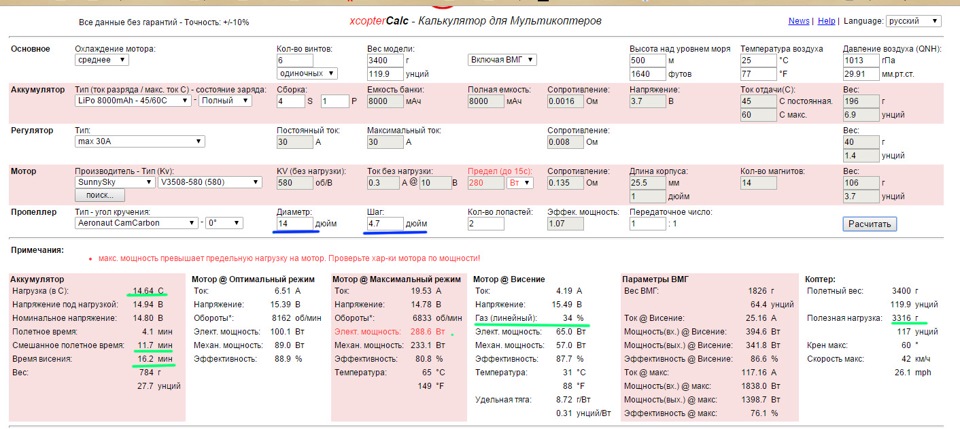
Видим, что совсем незначительное увеличение времени полёта ощутимо сказалось на нагрузке аккумулятора, которая возросла с 11 до 15С и нагрузке на мотор. В максимальном режиме даже выводится предупреждение о превышении допустимой нагрузки. Но при этом полезная нагрузка возросла почти вдвое, а газ висения снизился до 34%, то есть образовался небольшой избыток тяги. Такая конфигурация подошла бы, если бы я захотел повесить на свой коптер не GoPro, а камеру типа Panasonic GH4K или sony nex. Но тогда время полёта ощутимо сократится, ведь возрастет вес. Для полётов с такими камерами я приведу расчет в самом конце, а пока привожу пример, если на такой-же конфигурации использовать батарею большой ёмкости – 16000 mah. Её вес 1 кг (10С), она относительно недорогая – на сегодняшний день можно купить ее за 7300 руб с доставкой по РФ. Но и пропеллеры в расчетах уже ставлю не 1255, а 1355, так как возрастет вес аппарата.
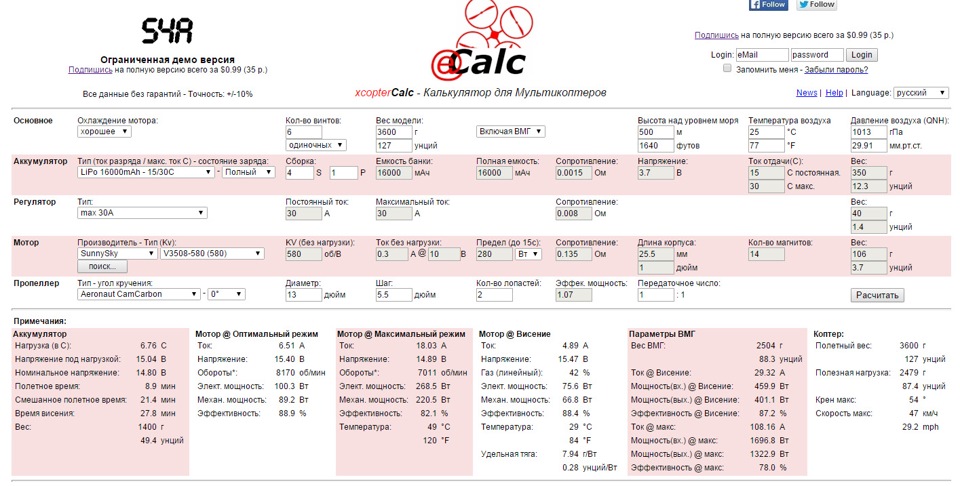
Расчетное время полёта в полном снаряжении уже составляет порядка 22 минут, а время висения подбирается к 30 минутам. На самом деле эти расчеты дают лишь приблизительное время полёта. В теории, в самой первой конфигурации расчетное время полёта 11 минут, а на практике оно составляет 16, а время висения 19 минут до звукового сигнала о достижении на одной из ячеек аккумулятора напряжения в 3,4 вольта под нагрузкой. И обратите внимание, нагрузка на аккумулятор составляет всего 6.76С. То есть, чем больше емкость аккумулятора, тем меньше нужно обращать внимание на эту цифру. Я бы даже сказал тем лучше, если эта цифра будет не в пределах 30-40, так как данный параметр скажется лишь на весе аккумулятора. Если расчетная нагрузка имеет запас почти в полтора раза, а пиковая нагрузка на аккумулятор и так обычно превышает почти вдвое заявленный параметр долгосрочной нагрузки (10-20С) (30-45С), нет смысла покупать более дорогой и тяжелый аккумулятор.
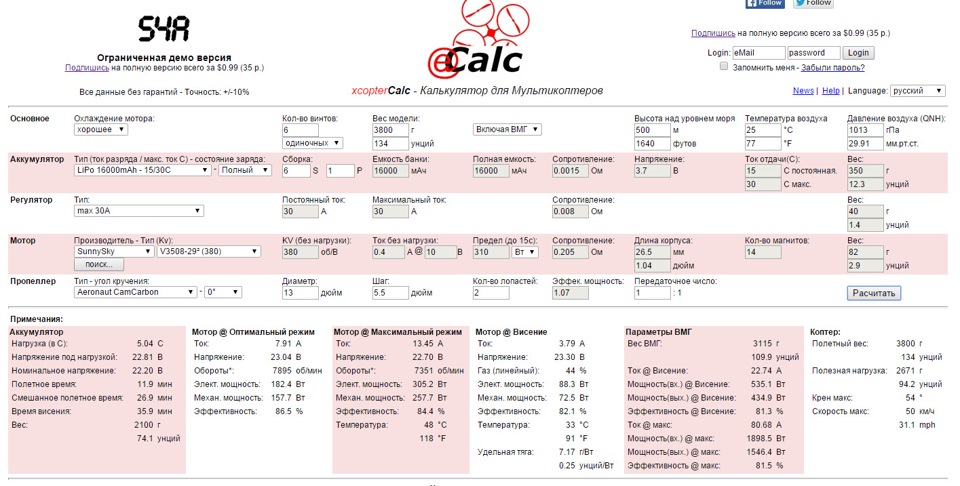
Если же нужно собрать настоящий грузоподъемный «долголёт», то тут нужны низко-оборотистые мощные двигатели такие как SunnySky kv380 и 6S батарея.
Что касается известного всем DJI Phantom 2, то его полётный вес составляет 1400 грамм, моторы dji 2312 kv960 (у первого «фантома» 2212 kv920), пропеллеры 9450 (у первого 9443), батарея 3S 5200 mah (у первого 2200 mah), регуляторы примерно на 20 ампер. Думаю, что вам будет интересно посчитать самим и понять, что будет с полётным временем и другими параметрами, если довесить на готовый аппарат 200 граммовый комплект FPV: видеопередатчик, с антенной и бортовой 2S-3S батареей. Скажу сразу, в среднем время полёта сократится на 5-7 минут. А вот 200 грамм для гексакоптера уже не так значительны. К тому же, многие задаются вопросом, есть ли в этом смысл, или даже устраивают дорогостоящие бессмысленные эксперименты без расчетов, по установке двух не оригинальных батарей большей ёмкости под лучи «фантома» вместо одной оригинальной. Смысла в этом совершенно нет, так как запас грузоподъемности у таких аппаратов очень мал. Теперь, понимая, как пользоваться калькулятором, советую вам посчитать самостоятельно.

Надеюсь, что моя статья будет для вас полезной. К вопросу о покупке деталей и запчастей для сборки, я пользуюсь известными всем иностранными торговыми площадками ebay и aliexpress, hbbyking и подобными.

Комментарии 164
"Как правило наклон оси ROLL (горизонта) регулировать не нужно, так как сложно придумать ситуацию, когда на видео нужно нарочно завалить горизонт."
Как вариант — поправить заваленный горизонт
Как-то не сильно задумывался о цифрах и реальных физических размерах…
Я правильно понимаю, что винт 1455 это 14" или 35 см в диаметре?
А если их 6, то габариты самого ЛА около 1,5 метра в "диаметре"?
Могу представить, как он гудит когда взлетает рядом…
Да, правильно понимаете
Комментарий удалён
Можете доверять продукции DJI. Берите, смело, если не пугают новые законы и штрафы от 20 тыс руб за полет.
Я всегда думал что kv это значение оборотов при котором ЭДС равно 1V
Друг, может ты мне хоть накинешь варианты с чего начать.нужен недорогой л/а(квадро гекто или что там еще есть но устойчиный на небольшие ветра)но главное чтоб у него была функция сброса(приманки).видео в принципе не так важно(но приветствуется) дальность полета не более 150м и высота 30м.но вылетов как можно больше, частота не менее 15мин.gannep93@mail.ru.Заранее благодарен
Вы даже первую строку статьи поленились прочитать? Я статью написал, чтобы меня перестали просить сделать все за вас. Читайте и просчитывайте сами, тем более если аппарат для коммерческой деятельности. Хотите чтобы за вас все сделали, а вы деньги заработали… Мдааа…
ни о какой коммерческой выгоде речи и не идет.я просто попросил помочь и все…в ввиде слов бери вот это это и это и все.дальше сам найду где взять и как все сложить в кучу
Вы поленились прочитать эту статью? Я частенько людям помогаю, но не в таких случаях, когда человеку лень прочитать, чтобы понять хоть немного.
Ключевое в статье то, что каждые 50-100 грамм веса сильно влияют на подбор комплектующих. А тут просто- ну груз таскать на 30 метров. Какой груз? Колечки молодоженам, наркоту через границу, кирпичи на стройку? Нужны точные исходные данные с точностью до 10 грамм, чтобы что-то начать считать.
я прочитал статью, но это практически не чего не поменяло.вес груза не более 150гр, дальность полета не более 200м, высота не более 30м.суть всего замыла не использовать кораблик на рыбалке и использовать бпла.так как кораблик не всегда справляется с течением.
Какой кораблик? Я знаю снасть "кораблик", на которую на течении сома ловят. Или вы просто планируете прикорм доставлять в нужную точку?
все верно смысл в доставке прикормки(в частности груз 120гр+наживка не более 30гр)
ищите на али zmr 250. если поставить батарею 1200-1600 mAh то грамм 200-300 он утащит, я проверял.
Тесты с протыканием аккумуляторов и последующими стонами: "смотрите как опасно!" уже достали. Никто же кидает зажженую спичку в бензобак с той же целью.
Статья 2013-2014 года и тогда 99% людей планеты вообще не слышали слов литий-полимер. Не стоит первоисточнику этой информации писать, что вас достали последователи.
Пока вы тут рассчитываете, чувак вон сам летает в ванне.
Эта статья была написана почти 4 года назад. Без нее он бы не взлетел )))
А что правда он летает, я думал фейк, у нас наверно штраф бы полляма за такое)) Вот и наделали бы промышленно такие, чем авто с самолётом скрещивать.
очень хорошая статья.
имеет ли такой проект право на реализацию? рама tarot 650 sport.
смог 20 минут висения получить только на 17 пропах (((
Нет, не имеет. Видимо плохо статью читали. Всегда нужно смотреть таблицу у производителя моторов.
Увлечён был временем полёта и забыл совсем что нужно характеристики движков ещё смотреть(((
Sol-N
очень хорошая статья.
имеет ли такой проект право на реализацию? рама tarot 650 sport.
смог 20 минут висения получить только на 17 пропах (((
Пересчитайте то же самое, но с батареей 6S ( соответственно вес батареи больше на 30%) + пропеллеры DJI 1650
Sol-N
очень хорошая статья.
имеет ли такой проект право на реализацию? рама tarot 650 sport.
смог 20 минут висения получить только на 17 пропах (((
И еще вот эту статью почитайте мою.
www.drive2.ru/b/464963952128819934/
Спасибо. Именно что "В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать."
А еще толковая информация чаще всего скудная, рассчитанная на тех, кто уже "в теме", а начинающему трудно в этом разобраться.
Очень познавательно ;)
Друзья, приветствую! Подскажите в качестве первой модели можно такой дрон для съемки брать supertoys.by/radioupravlj…li/Dji-Phantom-3-Standard Сам из минска, цены у нас кусаются. Для съемок свадьбы такой подойдет?
Лучше закажите из Китая Phantom 3 SE. Стандарт не пойдет потому что у него очень маленький радиус действия в диапазоне частот Wi-Fi сетей 2,4 ггц. Плюс задержки выше и в городе будет постоянно помехи ловить. А любая помеха и потеря видеосигнала- это прямой путь к тому, что коптер разобьется.
спасибо!
Приветствую коллега! Прочитал твою статью — очень интересно все описано. Сам владею Фантомом 3, хочу попробывать собрать за год грузовой гексакоптер. По техническому заданию должен: подниматься до 100 м, нести груз 4-5 кг. Дальность — 5 км. Автопилот с функциями полета по точкам. Ну для испытаний еще FPV комплект. Что посоветуешь и какой бюджет выйдет? Это первый дрон который хочу собрать.
Приветствую! Посоветую собирать на квадро раме соосную систему на 8 моторов (окта) на 6S батарее. Пропы не менее 15x5.5. Можно посчитать на аккуме li-po примерно на 10-15 А\ч, а когда станут ясны токи, то пересчитать на li-ion батарею на высокотоковых ячейках 18650, если токи будут не запредельными. На эту тему у меня тоже статья тут висит.
На счет полетного контроллера с полетом по точкам- вопрос сложнее. Бюджетных решений от DJI вроде бы нет. Так что придется разбираться либо с pixhawk'ом, либо читать про Tarot и подобные контоллеры. Я сам летаю уже пару лет на фантомах, поэтому статья слегка устарела.
Понятно, значит гекса такой вес не вытянит. Сколько выйдет бюджет на окта?
Скажем так, у гексы, размером примерно в метр, тяга будет меньше, чем у квадрокоптера. А у октакоптера с 8 моторами на отдельных лучах тяга будет меньше, чем на гексе. Беда в том, больше лучей оставляют меньше пространства под размер пропеллеров. Для подъема большого веса нужно высокое напряжение (6S и больше), большие пропы и низкооборотистые тяговитые моторы kv320-370.
Если взять, к примеру, мою гексу с картинки в статье- 690й размер. А пропеллеры встают максимум 13 дюймов. 14 дюймов уже цепляют друг друга. То есть поставить на такую раму моторы по KV ниже 580 просто бессмысленно. Потому что низкооборотистые моторы требуют больших пропеллеров. На 13 дюймовых kv скорее всего на предельных оборотах только свой вес и сможет поднять. А если взять квадрокоптер такого-же размера, то на него уже встанут пропы до 17".
Большое спасибо, буду думать. Посмотрел Dji 1000, такая рама вполне подойдёт. Но стоит она ой ой. Не говоря про оборудование.
Добрый день! Прошу помощи у знающих людей, так как решили подарить другу квадрокоптер, но путём читания интернета обзоров тестов в онлайн журнале Дронмания dronomania.ru/top/for-gopro.html здесь, оказалось, что не всё так просто, а точнее вообще мало что понятно (глаза разбегаются). В общем так. Друг занимается фотографией, ну то есть зарабатывает этим и любит снимать всякие необычные ракурсы и интересные композиции. Поэтому решено было подарить такую вещь, тем более у него уже есть GoPro. Итак, бюджет до 30000, будет использоваться для обзорных фото, обязательно крепление под GoPro, желательно всё это чтобы летало из коробки ) Заранее благодарю за помощь!
К сожалению в этом бюджете можно найти только стеранькие б\у аппараты DJI Phantom 2. Начиная с 3й серии DJI начал ставить свои камеры. Готовых бюджетных решений под GoPro у других производителей я не встречал. Можно, конечно, купить DJI Phantom 3 стандарт, он все-равно будет лучше, чем GoPro снимать. Но у него радиус действия метров 200-300 всего. Нормальные аппараты начинаются в цене от 50 тыс.
По идее можно самим собрать в этом ценовом диапазоне, но это не рационально.
Жаль будем думать дальше
Да, инфа полезная, спасибо. Начинаю в этом году собирать квадрокоптер Tarot 650. Уж больно понравился мне он.
Ухх, Евгений. Сегодня я бы уже посоветовал купить фантом и не мучиться, дешевле, эффективнее и надёжнее.
Не поверишь, хочу собрать этот гребаный Tarot, уж больно мне его конструкция и функционал по душе. )))
Знакомо. Я считаю, что через самоделы в любом случае нужно пройти, чтобы понимать что к чему. Хочу снять видео на тему этой статьи, только с учетом уже более чем 2 лет опыта после ее написания, внести коррективы.
С удовольствием посмотрю это видео.
огромное спасибо автору, такое количество информации в одном месте — удача.
хотелось-бы пообщаться лично.
Не за что. Если что, пишите вконтакте.
vk.com/gregory26rus
Да и тут могу ответить на вопросы. Можем и по скайпу созвониться, но сейчас работы завал, занят сутками.
отлично, сформулирую вопросы — свяжусь…
Согласен!
Посмотрел на Яндекс Маркете по скидке, можно и за 54 тыс взять с 4К камерой.
Ну 4К нафиг никому не нужно, а вот HD видеолинк LightBridge, который стоит на фантомах версии от 3 pro и свежее- это незаменимо, не имеет аналогов. И отдельно для самодельных аппаратов только сам этот видеолинк стоит 2000$. Поэтому не вижу смысла экономить 10 тыс руб на видеолинке, который стоит отдельно больше 100 тыс руб.
Ну молодец, статья отличная и понятная. Сам бы заморочился, но сейчас действительно проще купить)
Верно, статье уже 2 года. На тот момент Phntom 2 стоил 80 тыс + к нему камера нужна еще за 30 тыс + FPV оборудрвание отдельно ставится + монитор, в итоге было рациональнее собирать.
А теперь Phantom 3 pro с HD видео линком можно купить за 65 тыс новый.
очень много коментариев… незнаю был ли вопрос, но задам.
Что в итоге на данный момент целесообразнее купить готовый коптер для видео или собрать свой используя запчасти с али/ебей, для подвеса гоупрохи? с учетом отсутствия гоупрохи =)
DJI phantom 3-4 целесообразнее.
Очень интересная статья, коптер получился что надо!
все убедил мне уже жалко тратить
кстати как фантом?я вот хочу инспаер за 100 есть возможность прикупить 2.0 бу конечно
Я бы лучше фантома взял, если честно. Инспаер очень тяжелый, камера по факту снимает так же. Но носить маленький чемоданчик в сборе 3 кг или чемодан инспаера на 8кг — это огромная разница. Инспаер летает быстрее, а все остальное по мне- это его недостатки, а не преимущества.
Я с фантомом сейчас даже на мотоцикле гоняю или на велосипеде- рюкзак на спину и вперед. Инспаер громоздкий, мне хватило гексы.
Но инспаер это платформа для разнообразных камер.Говорят что новый аккумулятор готовится к выходу а это дальность и время полета.ну я подумаю.может ты и прав
Ну новый аккумулятор может прибавить 3 минуты полета и будет летать он почти как фантом, не дольше… Опять же, x5r пока стоит заоблачных денег, а вообще сейчас даже в кино качества картинки с камеры фантома 3 про хватает.
Там такую комплектацию описали что бы .просто как говориться полетать. что можно бу фантом 3про купить за 50-60 штук на авито и не заморачиваться хуйней.а если уж очень хочется можно за 35 mi drone найти
На момент написания статьи только вышел фантом 2 и стоил 115 тыс руб + gopro к нему нужна и FPV монитор, передатчик… Сейчас полностью соглашусь, я сам перешел на Phantom 3 pro, как только его цена упала до 70 тыс руб. Потому что гекса со всеми прибомбасами мне обошлась в 250 тыс, а лайтбридж, который уже на борту фантом 3pro, отдельно стоит около 100 тыс.
Так что все верно, больше не целесообразно собирать гексы для аэросъемки, но статья все-равно полезна самодельщикам для понимания, как рассчитывать и находить баланс для тех же пилотажных коптеров или гоночных.
я не спорю для любителей которым нравится это дело статья полезная я на статью не грешил.
Здравствуйте. Подскажите, как выбрать батарею.
Я беру двигатели SunnySky x2212-980 Kv www.rcsunnysky.com/html/2014/xseries_0916/11.html для гексакоптера.
Считаю нагрузку на двигатель — 500 г. Смотрю в таблице для пропеллеров 1047. Могу ставить 3S или 4S. Предположим, беру 3S. Смотрю, какой ток для 500 г — по таблице 6,2А. 6,2А умножаю на 6, чтобы узнать максимальный ток в цепи. Получается 37,2А. Теперь надо подобрать параметр С. Беру батарею Turnigy 3000mAh 3S 20C Lipo Pack. Считаю далее. 3(3000mAh) умножаю на 20 = 60А. Это покрывает 37,2А.
Можно так и оставить, или лучше выбрать батарею с такой же емкостью, но с меньшим/большим С?
Как посчитать минимальный С для батареи 3000 mAh? Взять максимальный ток 37,2 и разделить на 3? Или 37,2 умножить сначала на 2, а потом разделить на 3? Для первого случая тогда минимальный С будет
12,4, а для второго С = 24,8.
Или лучше подбирать эти параметры (mAh и С) по калькулятору?
Здравствуйте. Бегом прикинул ваши параметры, получается вариант не летаемый на 3000 mah. Точнее летать будет минуты три…
s017.radikal.ru/i416/1605/3f/5f9497e126c1.jpg
Честно говоря, я и статью писал для того, чтобы не объяснять каждому. Там же все описано и расписано.
В Вашем варианте нагрузка на аккумулятор 3000 mah составит 43C, а полетное время чуть больше 3 минут. Если хотите летать 3 минуты, то ищите аккумулятор с номинальной токоотдачей 60C и больше, 30-45C вздуется после пары полетов.
6,2 ампера мотор потребляет при висении в оптимальном режиме, а в максимальном 21,5 А — умножаем на 6, получаем 130 А + на запас нужно еще закладывать 30%.
Самый простой и правильный вариант брать батареи большей емкости. двое больше емкость, соответственно при прочих равных будет вдвое большая токоотдача, так как параметр C напрямую зависит от емкости.
Грубо говоря если Ваш коптер на 3000 mah батареи будет выжимать из батареи 43С, то из 6000 mah он уже будет требовать только 21,5С…
Калькулятор вам в помошь. Даже добавлю к статье для не внимательных. Мна частенько пишут, что я пытаюсь протолкнуть платный калькулятор. Я сам за него никогда не платил и не собираюсь.
www.ecalc.ch/xcoptercalc.php?ecalc&lang=ru
Если нет нужного мотора, переходим на вкладку другого производителя, выбираем любой, потом возвращаемся к своему и появляются уже другие моторы и так делаем, пока не появятся нужные.
Классный материал! Спасибо! А что по поводу эффекта "желе" на видео? Собрал свой первый квадрокоптер на раме S500. Подвес Tarot t4-3d. Очень сильное желе на видео. Так и не понял как его победить.
Это сложнее. Я по статье собрал себе стенд динамической балансировки пропеллеров в паре с моторами
forum.rcdesign.ru/blogs/109830/blog19122.html
Желе именно от вибраций моторов и пропов, а вот даже если победить желе, следующий этап настройки подвеса, подбора правильного расположения, правильной жесткости демпферов, чтобы от ветра не трясло и от маневров.
Спасибо за статью. Всё доходчиво и подробно.
Подскажи пожалуйста как читать таблицу, двиг+проп куда там смотреть и что с чем складывать ? или ссылку на разяснения что к чему.
Здравствуйте. Может, вы поможете мне в выборе полетного контроллера? Хочу собрать гексакоптер на Raspberry Pi 3. Не могу определить, какой полетный контроллер лучше взять: Navio 2, CRIUS AIO PRO Multiwii, Naza M Lite, KK2.1.5 или APM 2.6? Вроде как можно управлять моторами и всем остальным и с помощью Raspberry Pi, но это мне не подходит.
Если хотите много-много мучиться, а потом всё-равно прийти к naza, то выбирайте любой. Если хотите огромный функционал за адекватные деньги и много-много мучений с настройкой, то pixhawk, или apm. Naza вообще без заморочек, с ней и табуретка будет летать. Я еще тестировал Jiyi p2 — понравились полетные характеристики, он намного стабильнее всех ПК в плане отрабатывания позиции и быстрого спуска без перекосов, но очень некачественно произведен, у меня то GPS с завода был с замкнутыми контактами, то в полете дважды отваливался провод питания от PMU. Я бы с удовольствием потестировал контроллер tarot zyx-m. Вроде бы по заверениям по функционалу превосходит назу m v2, а по цене демократичнее. KK я бы не рассматривал, мультивий тоже, а с парой перечисленных Вами даже не сталкивался, если честно )))
Спасибо за ответ. У меня еще возник вопрос насчет калькулятора. Согласно рассчетам, мой гексакоптер должен летать. Но мне кажется, что я могла неправильно указать вес модели. Что означает "Включая ВМГ"? Что такое ВМГ — винтовая моторная группа? То есть в вес модели мне надо включить вес рамы, моторов, пропеллеров, регуляторов скорости, камеры, полетного контроллера, батареи? В общем, всего того, что я хочу поднять в воздух, так?
Если интересно, что такое Navio 2, можете почитать вот тут (на англ) www.emlid.com/ Это официальный сайт производителя.
А Raspberry Pi 3 — это мини-компьютер. Мне он нужен для обработки видео с коптера. Вот тут можно почитать, что это такое geektimes.ru/post/271808/
Все верно, ВМГ- это винтомоторная группа. Обязательно смотреть на сайте производителя вес моторов, т к в коптере расчетная масса в 100 грамм может сильно повлиять на все параметры. У меня, к примеру, недавно была ошибка с расчетами — стояли двигатели DJI 2212 920kv, решил поставить t-motor mn2814 kv 710, так вот DJI моторы весят 50 грамм каждый, а т-моторы 150 грамм каждый, то есть вес ВМГ утроился, а я не принял глянул вес. В итоге моторы очень мощные, но рама не позволяет поставить пропы больше 11 дюймов, а для верного кпд с правильным весом им необходимы пропы 13-14 дюймов, поэтому моторки лежат теперь без дела.
На счет Raspberry Pi 3, пробежался бегло по статейке и видео обзору, но не понял, какова его функция на коптере? Мне почему-то кажется, что Вы собираете городить нечто не целесообразное.
Интересно. Сам потихоньку пытаюсь выкладывать инфу о коптерах. Почерпнул много интересной инфы, спасибо.
Не за что. Сейчас опыта уже намного больше. Нужно бы переписать статью, или дополнить, да все некогда.
Интересно, что по калькулятору моё нечто летать не должно :)
Если газ висения 35-40%, то кпд хорош, а пропеллеры, скорее всего неправильно подобраны к моторам. В таком случае калькулятор покажет сообщения красные о превышении мощности двигателей. Если это так, то нужно смотреть, насколько мощность превышена. 10-15% от общей заявленной не страшно, а если больше, то можно и спалить движки. Я постоянно слышу от людей, что калькулятор врет. Почему-то у меня он показывает все с точностью до минуты полета.
Привет, подскажи какие лучше двиги поставить на раму DJI F550 ?
t-motor )))
Статью я для кого написал? В том то и суть, что нужно добиваться оптимальной конфигурации, пересчитывая на калькуляторе xcalc реальные двигатели, вес, батарею, пропеллеры, исходя из возможностей рамы и бюджета.
Насколько я понимаю, речь о гексакоптере. Рама вмещает максимальный размер 10 дюймовые пропы. Советую прикинуть свои возможности и посчитать, к примеру, такую конфигурацию — пропеллеры 1045, моторы sunnysky 2216 kv 800, батарея 4S 5-6 А\ч. Опять же, что нужно от коптера? Если будет ставиться подвес и камера, это одна конфигурация, если просто полетать- это другая, т к разница в весе в 300 грамм почти, если брать легкий подвес и гопро или аналогичную камеру. В общем вопрос Вами задан очень грубо и не уважительно. Видно, что статью Вы не читали.
Всю статью прочитал. Но есть ли калькулятор на оборот. Вес у меня будет 2400 г. где то пропы 10", рама f550 какие максимально мощные моторы можно поставить ? Инфы кроме ка поставить 2212 / 920 не нашел, ну и ваше предложение 2216 kv 800.
В моем случаи как я понимаю, рама диктует размеры проп, пропы диктуют двигло.
PS у меня уже собран FC40 весом 1700 г.
я вот думаю надо мне f450 или f550
понятно что второй стабильнее и тд, но я таскать не собираюсь что-то тяжелое и жрать меньше будет.
А с другой стороны он стабильнее. Не знаю что делать)
Тут важнее предназначение и предполагаемые моторы с пропеллерами. Просчитывать на калькуляторе, смотреть, где выше КПД. Скажу точно, что чем меньше пропеллеры и моторы, тем картинка приятнее, меньше вибраций. А стабильность- она во многом зависит от вибраций. Если они есть, то полетный контроллер будет отрабатывать хуже. А вообще и фантом крайне стабильный аппарат, стабильнее многих гексакоптеров с 680-800 размером рамы. Я лично участвовал в съемках на восхождение на Бештау, когда ветер был 12-15 м\с. Я не рискнул гексу поднимать в воздух, а напарник запустил фантика и он творил чудеса…

Комментарий удалён
Нет. А что там?
Идея создать своими руками летательный аппарат зародилась где-то пол года назад. Посмотрев завораживающие ролики Максима Чурбакова и других авторов в Ютубе, сложно было не соблазниться на решение заняться этим увлечением вплотную.
Автору отдельный респект за статью и консультации. На первых порах
статья послужила мне определенным букварем и проводником в мир коптеров. Очень помог калькулятор. В принципе, все основные расчеты и подбор компонентов определил именно он.
Основная концепция моего проекта — постройка "долголёта" для аэросъемки на базе камеры форм-фактора GoPro.
За основу взята рама Tarot 650 Sport. Посмотрев видео западных энтузиастов, загорелся доработать раму под пропеллеры с размером 17 дюймов. Для этого был заказан комплект карбоновых лучей длиной 333 мм.
Остальные компоненты следующие:
1. Аппаратура Radiolink AT10 с приемником R10D;
2. Батарея 6S 15000 mAh 25C;
3. Моторы Gartt ML4114 320Kv;
4. Пропеллеры 17х6" карбон складные;
5. Регуляторы оборотов Hobbywing XRotor 2-6S 40A;
6. Полетный контроллер Naza m Lite (без GPS-модуля);
7. GPS-модуль FFOSD-G2 (с возможностью поиска ГЛОНАСС);
8. Подвес Tarot T4-3D 3-Axis;
9. Камера XiaoMi Yi (1080P — 60 кадр/сек)
10. 5.8 ГГц FPV передатчик TS835 v2.0 600mW;
11. Крышка-колпак Tarot TL2851.
Просьба продвинутых в этой теме пользователей прокомментировать данную конфигурацию
Хороший конфиг, только с ростом размера винтов в разы растут вибрации. Простой балансировкой пропеллеров уже не обойтись. Я собрал себе резонансный стенд для динамической балансировки пропеллеров. Вот так выглядит прогон мотора с пропеллером на всех оборотах после балансировки- никаких вибраций. Жаль, что не снял видео до, т к мотор на луче прыгал на сантиметр вверх-книз.
Спасибо за информацию. Почитал ветку на форуме… Вы мне открыли "кроличью нору".
А что за софт используете для снятия показателей?
Очередная попытка объять необъятное. Разумеется, не успешная.
Никогда не понимал желания создать новую балабольную тему при наличии профильных ресурсов, в данном случае, со списком реальных летающих конфигов.
Это тебе просто читать лень. Тема не для таких людей, которые любят у кого-то что-то подсмотреть. Не задумывался о том, что готовые конфиги я и такие-же люди выкладывают чтобы такие вот бездарности ими пользовались, раз уж своей фантазии не хватает?
Чтобы фантазия начала работать в правильном направлении, надо сначала научиться летать на рабочем конфиге. Потом приходит понимание, работа над ошибками и просветление. Иначе получаются мудовые страдания. Что и видно в темах на профильных форумах.
С нуля практически никто не соберет ПРАВИЛЬНО летающий коптер.
Тем не менее если человек возьмет готовый конфиг без понимания основ, да еще и он его устроит, нужны ли такие "специалисты" особенно в сфере аэросъемки? Мне кажется, что нужно даже без практических тестов понимать, какова будет грузоподъемность аппарата, эффективность его работы под конкретные задачи, продолжительность полета и т д…
Гм. Не увидел посыла этой темы к подготовке специалистов.
Повторюсь. Для понимания надо не один пуд соли сьесть(не одну статью прочитать) и без практики точно не обойтись.
Само собой, но вот лезть в практику с теми же RTF фантомами- это 100% его уничтожение. Пока сам пытаешься посчитать, само собой вознимает интерес посчитать эффективность чужих готовых конфигов. Вот банальный пример- все ставят карбоновые пропеллеры с большим шагом на фантики, ведясь на рекламу что увеличивается время полета. А забей конфиг в калькулятор, там тебе и перегрузка двигателей с регуляторами и уменьшение времени полета и газ висения ниже 30%, который наза не способна отработать правильно. И движки не могут такие пропы разгонять моментально для корректировки при порывах ветра, отсюда даже самовозбуждающиеся раскачки с переворотами. Как можно что-то собирать, не понимая основ? На счет опыта согласен, но именно из-за доверия чужому опыту и нескольким крашам я разобрался с нюансами и поделился своим опытом с людьми, которые хотят основы простым человеческим языком прочитать, а не вычитывать сотни страниц форумов с 99 сообщениями из ста содержания у кого из сторожил писюн длиннее. Ну или соревнования в использовании инженерной терминологии, направленной на желание выглядеть умнее и не дать никому научиться чему-либо. Я прочитал всю возможную инфу со специализированных форумов и написал эту статью, благодаря которой мне не приходится по 10 раз в день отвечать людям на простые вопросы, на которые им придется неделю искать ответ на форуме из-за обилия флуда и "остроумия" участников. Не нравится материал- проходите мимо. Считаете себя спецом, покажите свои проекты. А то я понятия не имею, с кем тут спорю. Вероятно с человеком, который вообще отношения никакого не имеет к подобной технике.
В любом случае, выкладывание подобных тем на ресурсе для этого не предназначенном — бессмысленно. Маловероятно, что кто-то задумавшийся изучить основы коптеростроения, будет искать информацию на драйве, а не на профильных ресурсах. Ибо, там по любому гораздо больше полезной информации.
Ну находят же. Уверяю, что по этой статье уже не один десяток человек собрал коптеры. Она есть в закрытом форуме pixaero и тут. А в статье реферальная ссылка, по которой зарегистрировалось более 100 человек.
TheTERMINATOR
В любом случае, выкладывание подобных тем на ресурсе для этого не предназначенном — бессмысленно. Маловероятно, что кто-то задумавшийся изучить основы коптеростроения, будет искать информацию на драйве, а не на профильных ресурсах. Ибо, там по любому гораздо больше полезной информации.
И еще, если забить в любом поисковике релевантный запрос, типа как собрать квадрокоптер… Собрать квадрокоптер или купить готовый, собрать гексакоптер, основы коптеростроения или подобные фразы, то в первых позициях будет эта статья. А уж то, что она является не тематической для данного сообщества, я не согласен. Любой автомобилист любит подобную технику, если он любит свой автомобиль.
Ну конечно, по такой логике, любую тему можно к автомобильной притянуть.
Женские попки в любом случе имеют меньше отношения к данному сообществу, тем не менее мало кто возмущается тому, что почти все раскрученные авто обильно украшены "мужскими радостями"…
Женские попки есть на всем, что предназначено для мужской аудитории. А коптерами сложно соблазнить такой же процент потребителей.
Спасибо большое за статью! Я новичок и пока летаю на VL686G с FPV, взял как учебный. Но после прочтения Вашей статьи для меня многое прояснилось, и я решился собрать гексакоптер для любительских аэрофотосъёмок. Кстати я живу рядом, от Пятигорска 20 км. И если вас не затруднит, скажем так (не будет в ношу)…, я с удовольствием посмотрел бы на (плановый) если можно так сказать полёт вашего аппарата и с удовольствием задал бы вам много вопросов… Ещё раз спасибо за статью!
Приветствую, сосед! ))) Плановых полетов пока нет, но могу устроить внеплановый. Собираюсь продавать аппарат в ближайшее время и собирать что-то более серьезное. Нужно будет полетать перед продажей. Заказы на съемки на этот сезон по аэросъемке закончились. Так что будет желание, можно как-нибудь полетать. Правда у меня свободного времени больше по будням, чем по выходным. На выходных пока стабильно съемки. С понедельника по пятницу могу почти в любой день, правда погода пока не благоволит ))) Если что, пиши в личку, договоримся по времени.
собираю первый квадрокоптер.
рама x525 (не самая удачная, но такая уж выбралась очень давно)
моторы sunnysky 2212 980kv, регули afro ESC
мозг подарили kk2.0. с LCD, удобно. но не знаю, насколько будет геморно в настройке.
аппа fr-sky taranis (только едет с HK)
тут весь конфиг
docs.google.com/spreadshe…0iZ03GLznhUJ2E/edit#gid=0
критика приветствуется =)
эмм… ну как бы это сказать. Считать на калькуляторе пока времени нет. 210 баксов при нынешних курсах валют будет жалко вынести в первом же полете благодаря такому полетному контроллеру. У меня такой валяется. Было дело, повесил объявление- подарю, так никто не решился забрать XD
да время хрен с ним =) мне по первости и 15 минут будет выше крыши.
про kk2.0: на youtube, конечно, все красиво и до хрена видосов как на нем коптеры летают =)
а что брать? даже naza m lite дорого =( мультивий? crius aiop? все один хрен как кептен кук =)
Что-нибудь с GPS чтобы аппарат не улетел в произвольном направлении. Jiyi p2 простой вариант, полетит сразу и вернется по щелчку пальца сам. Зарулиться уж очень легко, на пропеллеры больше потратишь, пока летать научишься. На ПК экономить настолько сильно нельзя.
 это мой тестовый квадрик на P2. У него тогда еще не работал GPS, беда с кабелем была, но он держит лучше назы m v2 и позицию и вертикальное снижение. 32 битный, очень шустрый и простой мозг.
это мой тестовый квадрик на P2. У него тогда еще не работал GPS, беда с кабелем была, но он держит лучше назы m v2 и позицию и вертикальное снижение. 32 битный, очень шустрый и простой мозг.
так может еще подкопить и назу lite? =)
можно. Лично я на КК аппарат ушатаю сразу с опытом полета часов 15 на назе )))
хехе =) понял. ну, я пока еще в процессе строительства, помотрим
Gregory26rus
можно. Лично я на КК аппарат ушатаю сразу с опытом полета часов 15 на назе )))
задумался…а что скажешь по поводу naza m lite vs jiyi p2?
naza, вроде, тоже из коробки летает. хотя, и то и другое, вроде, надо "поднастраивать" софтом…
Наза надёжнее.
спасибо.
Всегда хотел себе такую игрушку)))))
Круто что даже на драйве кто то этим увлекается…случайно набрал и увидел кучу инфы что очень порадовало))) сижу прикидываю, цена вопроса бюджетного квадрика с камерой типа gopro или xiaomi yi и понимаю что не по карману((( Кажется куплю обычный и буду тупо учится управлять им и копить на фантом хотя бы 2-й)))
Спасибо за информацию)
Отличная статья! Много нужного узнал. А рамой F550 не сталкивались? Хочу на ней собирать просто.
Лично не сталкивался, но многие летают. Хорошая рама, довольно жесткая, на мой взгляд. Лучи можно дёшево про запас китайские покупать. Эти же лучи на многих квадриках используются. Вообще пластиковые лучи лучше поглощают вибрации, чем карбон, как мне кажется.
Отличная вышла статья! Очень благодарен, в 1 месте и все по делу. Лучше чем на форумах специализированных.
Планирую таскать 2кг (камера подвес и т.д.) не считая самого веса окты. И дальность полёта хочется большую. Раму хочется готовую из карбона, пока думаю о 690S, должно хватить. Буду рад советам, может сузится мой круг поиска.
Спасибо за добрые слова! Я сам в вечных экспериментах. Собрал себе квадрик маленький на базе рамы reptile 500 — аналог tbs "дискавери", полетал и понял, что хочу еще экспериментов. У меня для работы как раз отстроенная гекса 690S сейчас. Заказал себе складную раму h4 680 mm и моторы 400kv под батареи 6S, будет долголёт )))
Честно скажу, я вижу в таротовских складных рамах огромные минусы- как бы идеально не балансировал пропы, какими бы замечательными не были движки, есть вибрации и резонансы из-за небольших люфтов в местах сочлелений именно из-за того, что рама складная. Но пока найти идеальной рамы не получается. Еще поправочка к статье- если хочется именно снимать, то повторить подвиг DJI вряд-ли получится, берите фантом. Ну или для съемок просто необходим подвес именно zenmuse, т к ни один из ныне существующих даже не приближается к качеству его стабилизации. Купил фактически за ту же цену себе fy-g3 axis, и всё-равно он не всегда справляется. Также я видел фантом в деле при ветре в 10-12 м\с, всё-таки он очень круто держится! Даже тряски на видео не было.
Опыт вибраций на раме 690S интересен, благодарю. Натыкался на подобную информацию, но в любом случае хочется складную раму, так как нужно это все дело как-то транспортировать к месту вылетов. Я бы давно и с радостью купил фантом, но он увы не сможет пролететь 30 км с моей камерой и "кастом" подвесом (вес большой) Благо тут уже все решено, как будет полностью готов — представлю общественности. Из-за расстояния полета и веса нужно строить с нуля так сказать. Я даже смотрел по началу в сторону hover bike и discovery, увы они не справятся с этой задачей. Готовых долголётов в продаже нет))
На 400 моторы 13` винты ставили?
На 400 моторы пока ничего не ставил, будут стоять 1555 винты. У гексы минус в том, что не воткнешь большие винты. 13 дюймов и всё… В крайнем случае можно через один двигатели вверх ногами ставить и тогда хоть 15 дюймов лепи, винты пересекаться не будут. Что касается моей рамы, она всё-равно, так сказать, не складная. Дабы пропеллеры не попадали в кадр, мне пришлось брать 10мм трубки на всю длину и выносить камеру под передние пропеллеры, а сзади, как противовес, немного смещен аккум и висит FPV, как раз охлаждается лучше. Если сложить в таком состоянии лучи, получаешь крест тех же размеров… Второй вариант- опустить камеру вниз на уровне ног, но тут минус огромный получается в том, что в кадре постоянно полосы в солнечную погоду, т к солнце всегда проходит через 1 из 4х пропеллеров в кадре — бленда вряд-ли спасет. А еще бленда добавляет парусности очень сильно и подвес дергает каждым порывом ветра. И обзор всё-равно хуже при таком расположении камеры- всё равно при максимальном движении вперед пропеллеры перекрывают линию горизонта.
пропы в кадре я победил подключением rc-pitch в свободный канал приемыша. Накрутил ручку на аппе — и всё, камера смотрит вниз. И как убедился, в итоге результат лучше чем небо на полкадра) Подвес — это да, не раз читал что зенмус рулит. Но думаю, что дело в том, что он максимально сбалансирован и доведен до ума еще на заводе. Мне же со своим 8-битным, да еще и самопальным трехосевым — еще копаться и копаться, чтоб получить достойную картинку))
Gregory26rus
Спасибо за добрые слова! Я сам в вечных экспериментах. Собрал себе квадрик маленький на базе рамы reptile 500 — аналог tbs "дискавери", полетал и понял, что хочу еще экспериментов. У меня для работы как раз отстроенная гекса 690S сейчас. Заказал себе складную раму h4 680 mm и моторы 400kv под батареи 6S, будет долголёт )))
Честно скажу, я вижу в таротовских складных рамах огромные минусы- как бы идеально не балансировал пропы, какими бы замечательными не были движки, есть вибрации и резонансы из-за небольших люфтов в местах сочлелений именно из-за того, что рама складная. Но пока найти идеальной рамы не получается. Еще поправочка к статье- если хочется именно снимать, то повторить подвиг DJI вряд-ли получится, берите фантом. Ну или для съемок просто необходим подвес именно zenmuse, т к ни один из ныне существующих даже не приближается к качеству его стабилизации. Купил фактически за ту же цену себе fy-g3 axis, и всё-равно он не всегда справляется. Также я видел фантом в деле при ветре в 10-12 м\с, всё-таки он очень круто держится! Даже тряски на видео не было.
не знаю, не знаю… полетав, пришел к выводу что хочу ironman 650… сейчас у меня dji450. Во-первых, более 12 дюймов туда не засунешь — не тот размер. А значит долголет не получишь в принципе. Во-вторых лучи хлипковаты, бывает что ловил резонанс, если резко газануть в максимум. И самый главный минус — как раз в том что она не складывается. Из чего следует, что иначе как на машине с ним особо никуда и не выберешься. А так иной раз хочется залезть с квадом в электричку и махнуть за город. И при этом не крутить баранку, а спокойно подремать с полчасика)
Любопытная статья. Подскажите какой бюджет необходим чтобы собрать такой аппарат? И еще Вы писали полетное время аппарата 15-20 минут. 15-20 минут это много или мало? В смысле чисто для себя полетать.
Бюджет очень сложно подсчитать. Мой аппарат с камерой и хорошей аппаратурой управления + если учесть разбитые во время экспериментов раму, десяток пар пропеллеров, 1 аккумулятор + необходима зарядка ( у меня их 2, одна обычная, вторая на 4 аккумулятора сразу) + FPV аппаратура (видеошлем), приемник, передатчик, монитор с креплением на аппаратуру… В общем у меня всего этого добра уже получилось на 250 тыс руб в сумме на сегодняшний день.
А если просто для себя полетать, то достаточно иметь примерно такой комплект:
1) рама: reptile 500 — 2000 руб
2) моторы 4 штуки — примерно по 1000 руб за штуку
3) регуляторы оборотов 4 штуки — тоже примерно по 1000 руб за шт
4) полетный контроллер naza m lite примерно 9-10 тыс руб
5) аккумулятор 4S 3700 mah 3000 руб
6) пропеллеры 1045 2 пары 1000 руб
7) аппаратура управления хотя бы траннис — 10-12 тыс руб.
Если еще и поснимать, то подвес от 8 до 25 тыс руб.
Если еще хочется видеть что снимаешь, то монитор с приемником от 8 тыс руб
Видеошлем или очки от 15 тыс руб
Видео передатчик + антенны нормальные клеверные еще от 5 тыс руб
Если еще хочется видеть показатели телеметрии наслоенные на видео поверх, то нужно полетный контроллер не за 9 тыс, а за 17 и к нему OSD за 4500 руб.
В общем у меня у самого комплект большой. 2 подвеса, монитор и видеошлем с HD IPS матрицей и к шлему хэд трекер приделан, чтобы куда голову повернул, туда и камера.И зарядка одновременно на 4 батареи + обычная. Зарядка тоже стоит от 2 тыс руб. Моя стоит 10 тыс. Аккумуляторы мои стоят от 5 до 10 тыс руб каждый, их 5 штук. Складные шассти, подсветка, BEС трансформаторы для понижения напряжения на 12 и 5 вольт для всего дополнительного оборудования на коптере. В общем тут действительно конструктор такой, что может затянуть до таких глубин, что аппарат будет стоить дороже среднестатистической машины. Необходимый минимум я описал выше.
Искал на яндексе инфу про моторы sunnysky v3508 kv580…
Опа, drive2! Данунафик))
А тут такая кладезь информации) Спасибо за статью. Собрал f450, потом f550, теперь планирую апгрейд с увеличением длинны лучей/движки sunnysky v3508 kv580… или уход на tarot 680/690.
Классно написано, ещё раз спасибо)
Спасибо за хороший отзыв! Лично я бы на Вашем месте переходил на 690 с движками под 6S батареи, если финансы позволяют. kv380 и диаметром побольше ) Можно долголёт собрать, который минут 30 будет смело находиться в воздухе.
Я об этом думаю) Прям идеал взять DJI e600 комплект и tarot 690.
Но придётся спалить много лишних средств)
Я сейчас летаю 5-7 минут, 15 думаю мне будет за глаза =)
PS подскажи пожалуйста где брал винты 1255 под sunnysky v3508 kv580
На aliexpress и на барахолке rcdesign.
gign88
Я об этом думаю) Прям идеал взять DJI e600 комплект и tarot 690.
Но придётся спалить много лишних средств)
Я сейчас летаю 5-7 минут, 15 думаю мне будет за глаза =)
PS подскажи пожалуйста где брал винты 1255 под sunnysky v3508 kv580
Правда с барахолкой нужно быть очень аккуратным. Меня там вчера кинули на 11 тыс руб. Для квадрика хотел купить назу, в итоге нарвался на мошенника.
Карма в нашем деле штука важная. Портить нельзя) Обязательно сволочь разобьётся!
Я встрял на aliexpress на 12тр.
Пока товар закахывал продаван поменял срок доставки на 5 дней. Я зашёл через дней 10 проверить заказ и орхенел. Продавец слился, естественно ничего не пришло))
Я упорно ищу отличия tarot 680 от 690. Разница только в мотормаунтов?
PS aliexpress промотал там пропы под t мотор с 3 дырками… не осталось ссылки именно твоих?
Странно. Я на али никогда еще не попадал, хотя заказов под сотню уже. Там же защита покупателей неплохая, только за сроками следить нужно. На счет ссылки на пропеллеры, пролистал покупки у себя на али и ebay и понял, что пропы заказывали с аккаунта жены, поэтому пока что не могу найти ссылку. Нужно у неё спрашивать.
Можно на самом сайте тарота официальном заказать. Говорят там бесплатная доставка и с качеством всё ок.
Различия рам 680 fy и 690S в длине лучей и мотормаунтах. У 690 мотормаунты лучше, а лучи чуть короче, чем у 680 fy. У 680 pro еще разводка питания по центральной плате реализована.
Но я советую ставить плату с bec сразу вот такую
air-hobby.ru/katalog/prod…a-100-a-s-bec.html?r=4221
и раму брал в этом же магазине, там цена адекватная air-hobby.ru/katalog/prod…-690s-tl68c01.html?r=4221 7500 руб + 300 руб доставка до двери.
Привет ещё раз!)
Я посоветоваться с гуру =)
С дуру выиграл на аукционе ebay комплект dji e600
Раму буду брать 690 раз такая движуха.
Возник вопрос, доплатить и взять e800 (не окажется ли это слишком мощно, буду носить гопро с подвесом, вес наверное как у тебя)?
PS ну как gen ace? стоит того? почём вышли?
Gens Ace еще не распробвовал. Разрядил 1 раз 1 батарею из двух. Летает по времени как 8000 turnigy, но она и весит на 300 грамм больше. Что касается 800й рамы, я бы для GoPro не брал. Я вообще себе купил аналог TBS дискавери, буду собирать небольшой квадрик, уж слишком велик соблазн летать под деревьями и над дорожками. 690й для этих целей уже страшно использовать.
ну воспользовался я этим калькулятором, выходит что квадрик мой и пяти минут не отлетает.
может и считал не так…
моторы sunnysky v2216-12 800kv
винты 1045
ESC EMAX 40C
мозги naza lite c gps
батарея 4S 2200mAh 40C
рама клон dji 450
вес — 1,4 кг примерно, пока без подвеса и гоупро
Аккумулятор
Нагрузка (в C): 25.53 C
Напряжение под нагрузкой: 13.39 В
Номинальное напряжение: 14.80 В
Полетное время: 2.4 мин
Смешанное полетное время: 5.4 мин
Время висения: 7.9 мин
Во-первых большинство людей летают так, что смотреть стоит больше на время висения, чем на полётное время. Полётное время подразумевает вжаривание на полную катушку. У меня, к примеру, полётное время 5 минут, а время висения рассчетное 19 минут. До разряда на одной из банок до 3.3 вольт аппарат нормально летает с хорошими ускорениями до 15 минут. Если будет просто висеть, то и 20 минут спокойно висит. А вообще чего ждать то от 2200 ма батареи? Это же смешно. Даже на фантоме батареи 5200 Ма при том, что он весит 1400 грамм уже с камерой, подвесом и батареей.
Так что калькулятор все верно говорит.
Еще он говорит, что есть запас тяги
Мотор @ Висение
Ток: 3.38 А
Напряжение: 15.08 В
Газ (линейный): 40 %
То есть можно пробовать аккумулятор посерьезнее. К примеру 6000 mah
Полетное время: 5.6 мин
Смешанное полетное время: 12.1 мин
Время висения: 16.5 мин
Газ висения 45 %
при выборе батарей и вмг руководствовался статьей cezarepicentr, вот его обзор #
именно 4S 2200 с высокой токоотдачей как я понимаю, он считает оптимальным, хотя бы потому, что аккум большей мощности будет и больше весить. В итоге выигрыш от перехода на него, в пересчете на деньги и продолжительность полета будет не таким уж значительным.
Нужно всегда собирать оптимальную конфигурацию, для этого и нужен калькулятор. Во-первых тут ваше заблуждение- одни и те же аккумуляторы, но с токоотдачей 20С против 40С будут весить на 30% меньше и жить дольше из за менее значительных нагрузок. Если взять аккумулятор 2000mah 40C против 4000mah 20C на предельной нагрузке токоодтача будет совершенно одинаковой, так как значение С напрямую связано с ёмкостью аккумулятора. А вес не удвоется, а увеличится на 60-70%. В итоге время полёта, конечно, не удвоится, но при правильном расчете и подборе пропеллеров станет на 50-60% больше. Да, ёмкость не увеличивает время полёта пропорционально. И при этом дополнительный вес снижает маневренность и резвость аппарата. Но если речь об аэросъемке, то тут важна каждая минута и больший вес является плюсом, так как аппарат меньше подвержен окружающим воздействиям.
Кстати, просмотрел статейку и не увидел никаких расчетов. Это стандартная слизанная с форума конфигурация. Я же попытался в статье разжевать, как понять и самому в сравнении добиться оптимума, оперируя разными показателями.
Теория теорией, но вот на практике сколько летает Ваш аппарат? Вы сами говорите про выбор аккумуляторов низкой ёмкости с высокой токоотдачей. Приводите пример аккумулятора 40C. Но почему именно 40C, если надеетесь, что он будет долго летать? Ведь 40C значит что аккумулятор может отдать всю свою емкость 2200 ма за 1,5 минуты.
Приведу еще пример, касаемых моего аппарата и моих аккумуляторов. Я могу спокойно использовать аккумуляторы 4S 5000 mah 20C, так как расчетная нагрузка не превышает 12C. А если я буду использовать аккумуляторы 16 000 mah 10C, то нагрузка на батарею от такой ёмкости уже не более 6C. И при этом 5А аккум весит 650 грамм, а 16А, который втрое больше ёмкостью, весит 1250 грамм, то есть всего вдвое больше. Если я просто вывожу подбором пропеллеров (в соответствии с рекомендациями к своим моторам) газ висения на 45-50% с 16А аккумулятором, я получаю время полёта в 2,2 раза больше, чем на 5А батареях. При этом разница в цене между моими 5А 30-45 C (которые использую по факту) и 16A 10С всего в полтора раза, так как производство аккумуляторов с низкой отдачей заметно дешевле.
Огромнейшее спасибо за столь развернутый ответ!
По сути это мой первый коптер, надеюсь что не последний), и пока он в процессе прибытия комплектующих и создания, так что есть время подумать над более емкой батареей. Естественно о его времени полета я могу только строить догадки, и теперь уже очевидно, что оно не будет большим.
Действительно, попробовал в калькуляторе разные значения емкости для 4S — вес да, увеличился, но возросла и полезная нагрузка (не знаю, должно быть так или нет), а с батареей в 6000 ма/ч и более так вообще время полета и висения получается очень даже приемлемое, при том что еще под гоупро с подвесом силы останутся.
www.parkflyer.ru/product/103485/ — может есть смысл сразу такую на 8000 ма/ч ставить? расчет для батареи 8000ма/ч 30/45С показывает:
нагрузка ~7,6С
вес 1800 полетный
газ висения 51
грузоподъемность 900 г
время полета ~8
время висения ~20
Вот именно эту батарею не советую! У меня есть именно такая и она какая-то непредсказуемая. То аппарат с ней летает 19 минут, то 8. Хотя каждый раз заряжаю в режиме балансировки и отслеживаю напряжение на каждой банке. Разряжается ровно, но заряд проседает резко иногда. Из хороших стоит смотреть turnigy nano tech или zippy compact. Я же перехожу на дорогие, но надёжные Gens Ace.
А в целом расчеты верные. Газ висения в снаряженном весе не более 55-60% и всё будет отлично!
Еще раз огромное спасибо!
Редко кто может дать грамотный совет по поводу коптеростроения=)
Пожалуйста! Обращайтесь, если что. Я получил сегодня 2 батареи Gens Ace 6200 mah и заказал себе новую раму tarot 690S, а еще новый 3 осевой подвес, BEC трансформатор. Грядут перемены )
Перемены это хорошо! Поздравляю с покупкой)
Спасибо!
Интересно и познавательно!
Прочитав предыдущий пост задумался о такой штуковине…
статья так статья! Очень познавательно!
Спасибо, Паш! Руки у тебя из нужного места растут. Вероятно и тебе пригодится когда-нибудь ;-)
очень бы хотелось, но пока финансовое голодание наложило мораторий на увлечения(
Отлично! Так подробно расписано !
Спасибо, старался )
серьёзно расписал! очень интересно
Спасибо, рад, что кому-то интересно )
Откуда всё нарыл или сам этим занимаешься!
Сам писал ))) Тут моя личная история и опыт.
Да, интересно очень. Я вот только начинающий))
DJI Фантом 2 взял себе, теперь пробую, вот только не хватает монитора на пуль, тяжело летать. Лучше вообще очки купить!
Лучше fpv шлем eYebox www.eyeboxfpv.com/ . Я вот только избавился от своих очков FatShark Base SD. Стоят сейчас около 25 тыс руб, а изображение и удобства с ними ужасные. Шлем выглядит похуже в плане дизайна, но ощущение, что сидишь в центре кинотеатра. Угол обзора 60 градусов и HD IPS матрица с точной цветопередачей внутри.
Спасибо за инфу.
Хоть есть у кого спросить.
А то в инете много чего написанно, поинтересоваться не у кого!
Gregory26rus
Лучше fpv шлем eYebox www.eyeboxfpv.com/ . Я вот только избавился от своих очков FatShark Base SD. Стоят сейчас около 25 тыс руб, а изображение и удобства с ними ужасные. Шлем выглядит похуже в плане дизайна, но ощущение, что сидишь в центре кинотеатра. Угол обзора 60 градусов и HD IPS матрица с точной цветопередачей внутри.
Вечер добрый, у меня такой вопрос, есть рама Tarot 4X и есть движки Tarot 5008 340Kv какие оптиамльные винты мне лучше ставить?Вычитал, что 22Х5.5 это, что получается, винт один длиной полметра?Если он 22 дюйма(1дюйм = 2.54см)?Ерунда какя-то?
Добрый. Для начала нужно посмотреть на сайте производителя, какие винты по размеру максимально влезут. Затем искать у производителя инфу по моторам, с какими пропами их тестировали и какие результаты. Ставить больший размер или шаг, чем указаны в таблице производителя крайне не рекомендую. На счет 22 дюйма, я таких размеров даже не встречал. Максимум 17 дюймов. Кстати, винты размером более 13 дюймов стоит покупать только дорогие с хорошей балансировкой, ну или самому выводить балансировку в идеал, если коптер планируется для съемок.
Рама то какой размерности? Я так понимаю, что 680 ?
Рама 960мм, по диагонали… движки 5 см диаметр на 340 кв…да я для съёмок собираю квадр…по частям…не могу понять одно, какие же мне винты покупать?Что такое 22Х5.5 ?Дюймы или см?Есть такие винты 2500р за пару стоят карбон, но 22 дюйма это полметра грубо…как это понимать?
А статью читал? Калькулятором пользовался? Чуть освобожусь, посчитаю сам и дам ответ. На том же сайте тарота самые большие пропы 1855. Это дюймы, всё верно. Рама позволяет уместить 22-24 дюйма, но это мясорубка, которая ребенку голову отрубит, если он подойдет. Даже 15 дюймовые пропеллеры могут пальцы отсечь без шуток. Рама и моторы уже куплены, или только в планах? Какую камеру планируется таскать, какие аккумуляторы будут?
Куплена рама и движки, АКБ 8000 мАН и мелочёвка, скоро подвес придёт с ебай…ещё много чего покупать, я это понимаю.дело времени, камера зеркалка Canon 7D + объективы различные по ситуации, а по безопасности я в курсе, просветили люди имеющие подобные машины и с опытомтолько у них не на 4 луча, а на 6…2 бутылки питной воды поднимают без напряг особых…только тогда я не думал покупать подобную штуку и не спросил про винты, а сейчас их не могу найти)))это для съёмок свадеб, юбилеев и т д…для того, чтоб ракурс снять на мосту например или со стороны моря молодых, так же облёт по кругу с 50 метров радиуса, в общем для ракурсов которые не возможно снять иначе…
Аккумулятор 6S 22 вольта? Гексы на 6 моторов само собой подразумевают меньший размер пропеллеров, меньше вибраций, большую устойчивость, меньшую опасность. Плюс в 4х лучах в том, что большие пропеллеры можно установить, но я бы выбрал гексу для таскания зеркалки.
Нужно просто вес прикинуть.
Вес рамы с моторами получается где-то 3 кг. Вес коптера в сборе с подвесом и камерой 5 кг минимум + батарея 1,5 кг… итого 6,5 кг.
8000 батарея, 1855 пропеллеры — не очень радуют показатели
Полетное время: 3.8 мин
Смешанное полетное время: 7.7 мин
Время висения: 9.3 мин
макс. мощность превышает предельную нагрузку на мотор. Проверьте хар-ки мотора по мощности!
Нагрузка на аккумулятор: Нагрузка (в C): 15.95 C
Элект. мощность: 705.5 Вт
Механ. мощность: 577.1 Вт
Висение:
Газ (линейный): 60 %
Полетный вес: 6500 г
Полезная нагрузка: 4488 г
Крен макс: 54 °
Скорость макс: 36 км/ч
22.4 миль/ч
Макс. скороподъемность: 5.5 м/с
В принципе конфигурация рабочая, если не считать, что моторы сгорят на 90% газа, т к нагрузка на них на 200 ватт больше допустимой.
Очень надеюсь, что я ошибся с конечным весом.
5.5 кг дает более приятную картину, но на моторы нагрузка всё-равно критическая.
Предел 680 ватт у моторов, а получится 705 при 100% газа.
Andrey240869
Куплена рама и движки, АКБ 8000 мАН и мелочёвка, скоро подвес придёт с ебай…ещё много чего покупать, я это понимаю.дело времени, камера зеркалка Canon 7D + объективы различные по ситуации, а по безопасности я в курсе, просветили люди имеющие подобные машины и с опытомтолько у них не на 4 луча, а на 6…2 бутылки питной воды поднимают без напряг особых…только тогда я не думал покупать подобную штуку и не спросил про винты, а сейчас их не могу найти)))это для съёмок свадеб, юбилеев и т д…для того, чтоб ракурс снять на мосту например или со стороны моря молодых, так же облёт по кругу с 50 метров радиуса, в общем для ракурсов которые не возможно снять иначе…
Ради интереса наобум поставил в калькуляторе пропеллеры 20 дюймов, нагрузка на мотор возросла до 900 ватт при предельной 680. В общем предельный размер пропеллеров — 18 5.5, предельный вес 5,5 кг. Ружно стремиться к этому. Иначе рухнет эти 6 кг и убьют кого-нибудь. Советую для полетов купить какой-нибудь panasonic G6 или меджик покет синема, а не 7D вешать. Сразу и подвес поменьше можно ставить и камера легче и картинка не хуже.
Понял, благодарствую!Как ты скажешь, так я и сделаю…18 значит 18…хотя это и так не мало, 45 см длины…у меня есть сони нех 3ф попробую для начала её покатать…а там посмотрим…и есть кенон 1100Д он 450 гр весит тушкой и если повесить оптику широкоугольную то грамм 550-600 будет…тоже в принципе пойдёт…просто мне желательно качество хорошее и для этого может на лёгкую кенон 1100д повесить объектив получше?..И вес 1 кг будет, как бы номально думаю для такого квадра…в 5 кг за всё про всё войду…
Тут беда в весе батареи. Просто сам квадрокоптер + батарея получается больше 4 кг. Камера с подвесом должны в сумме на 1 кг выйти для нормальной конфигурации. NEX вроде бы полегче должна быть и картинка на ней приятнее. Вопрос в подвесе. Для качественной съемки нужно брать зенмус, но он непомерно дорогой. Если что-то другое брать, то с запасом мощности моторов, на 32 битном контроллере alexmos и при этом чтобы весил адекватно. В общем минимум веса- это очень важно!
Сча поищу зенмус…никогда не слышал…
Andrey240869
Куплена рама и движки, АКБ 8000 мАН и мелочёвка, скоро подвес придёт с ебай…ещё много чего покупать, я это понимаю.дело времени, камера зеркалка Canon 7D + объективы различные по ситуации, а по безопасности я в курсе, просветили люди имеющие подобные машины и с опытомтолько у них не на 4 луча, а на 6…2 бутылки питной воды поднимают без напряг особых…только тогда я не думал покупать подобную штуку и не спросил про винты, а сейчас их не могу найти)))это для съёмок свадеб, юбилеев и т д…для того, чтоб ракурс снять на мосту например или со стороны моря молодых, так же облёт по кругу с 50 метров радиуса, в общем для ракурсов которые не возможно снять иначе…
Бери Tiny Whoop по бюджету нормальные mykvadrocopter.ru/kak-sob…-kvadrokopter-tiny-whoop/
отлично все расписал
Спасибо!