

Для максимальной реализации имеющейся мощности автомобиля необходимо чтобы ведущие колеса немного буксовали. Степень букса зависит от покрытия, и если не вдаваться в детали, то оптимальным считается порядка 6…10% по сухому асфальту/бетону. Поскольку "ловить зацеп" педалью газа на мощном авто довольно проблематично необходимо было разработать устройство, которое бы автоматизировало этот процесс. В итоге был внедрен и испытан Traction Controller.
С его помощью возможно реализовать оптимальный разгон с сохранением управляемости.
Принцип действия девайса заключается в том, что сравнивая скорости вращения передних и задних колес, формируется выходной сигнал пропорциональный степени пробуксовки ведущих колес.
В моем случае плавное изменение от 4,84в=0км/ч до 0в=31км/ч. То есть при пробуксовке передних колес относительно задних на 31км/ч выходной сигнал с 4,84в падает до 0в.
Далее подавая этот сигнал на один из входов Января 5.1 возможно управление выходным моментом через отскок УОЗ, попеременное отключение зажигания/форсунок, коррекция топливоподачи и т.п.
Реализация ТС возможна разными способами — например оборудовать машину 4 индуктивными датчиками (у кого есть АБС с такими датчиками — тем почти ничего делать не придется ) + триггерами (венцами) на ступицах, либо тормозных дисках, и подать с них сигналы в устройство.
В моем случае имея АБС на борту все было вроде было не так сложно как могло бы.
НО!
Моя система АБС дополнительно имеет в своем составе подсистему управления ТС (Traction Controller)+ систему предотвращения заноса ESP+ подсистему ABD(Automatic Brake Differential)
Последняя система- притормаживает пробуксовывающее колесо на разгоне передавая тем самым момент на противоположенное. Эдакая заводская блокировка диффа.
Самое главное-данная система имеет CAN-шину для связи с блоком управления двигателем, для возможности передачи команд на снижения момента двигателем, передачи информации и пр.
В таком ключе нельзя было не использовать этот момент.
Поэтому, один очень грамотный и хороший человек — poweredbymonster
изготовил мне беспрецедентное устройство — Traction Controller CAN bus.
Ссылку на его БЖ я оставлю здесь www.drive2.ru/r/chevrolet/699525/ Проживает он в Украине.
Очень много интересного почерпнул. Но самое главное -это его порядочность и педантичность в работе. Такое сейчас встречается редко. В общем очень рекомендую. Глубокий тюнинг- это к нему.
Дело в том, что в CAN шине уже есть вся необходимая информация по скорости вращения всех колес, есть там так же и необходимые разности скоростей вращения и колес и осей и пр. информация.
Остается её только прочитать и преобразовать в нужный нам сигнал.
Для всего этого разработчику девайса пришлось раскуривать протокол обмена по CAN bus и вычленять от туда необходимую информацию в общем море высококвалифицированного труда, затем испытания на реальном блоке АБС-ESP. Работы продолжались почти полгода-и это далеко не с нуля.
По итогу еще и получилось реализовать его работу без горящей лампы ошибок по ESP
(При отсутствии родного блока управления двигателем горит ошибка ESP )
ТС имеет следующий функционал:
1) определяет скорость каждого колеса;
2) определяет скорость каждой оси;
3) определяет разность скоростей осей;
4) определяет % проскальзывания (пробуксовки) ведущей оси;
5) определяет ускорение (как продольное, так и поперечное) авто;
6) имеет 2 имитатора датчиков скорости авто (ведущей и ведомой осей), с возможностью расчета по средней скорости оси, либо по максимально вращающемуся колесу.
7) имеет 2 аналоговых выхода (0…5В) с сигналом, пропорциональным либо разности скоростей осей, либо % проскальзывания (определяется настройками);
8) Выход индикации светодиодом проскальзывания ведущей оси- моргание (больше-чаше моргание)
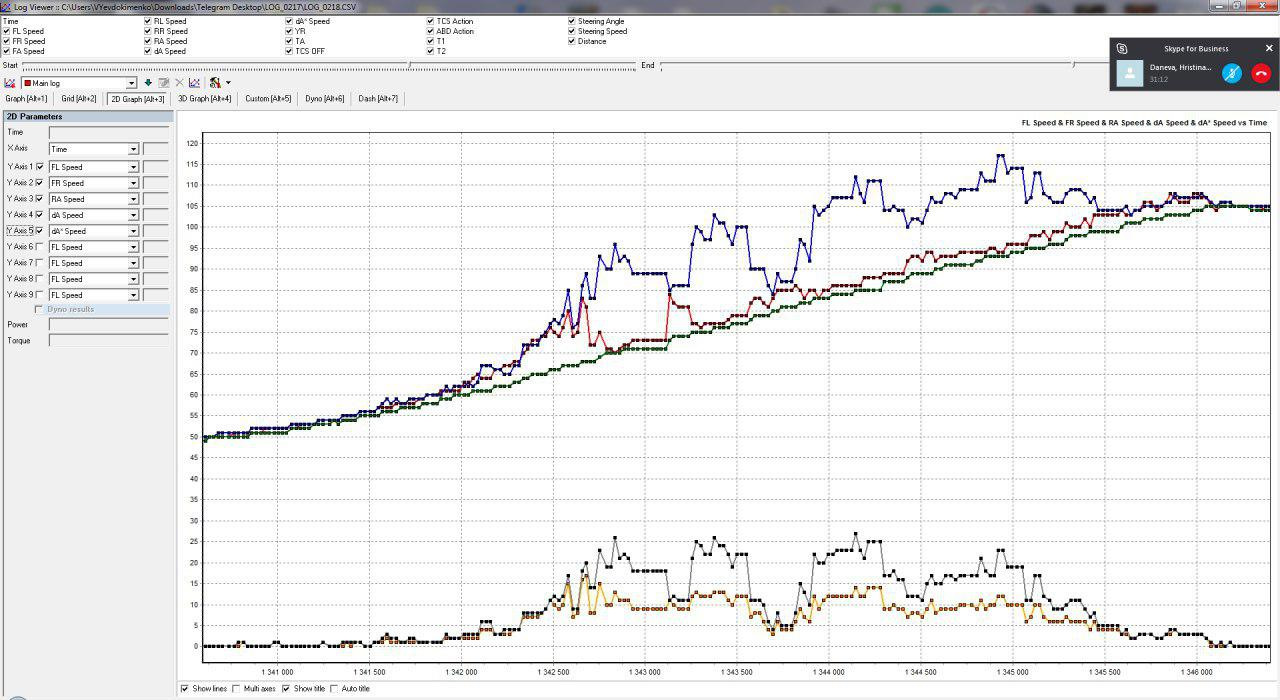
9) микроСД слот для записи всех параметров с частотой 25 Гц (расчёт всех параметров происходит еще быстрее — с частотой 100 Гц).
Законченное устройство имеет вид :


Подключается к замку зажигания, массе, 2провода кан-шины, выходы текущей скорости и процента пробуксовки для Января и выход на лампу индикации.
По итогу должно быть примерно так:
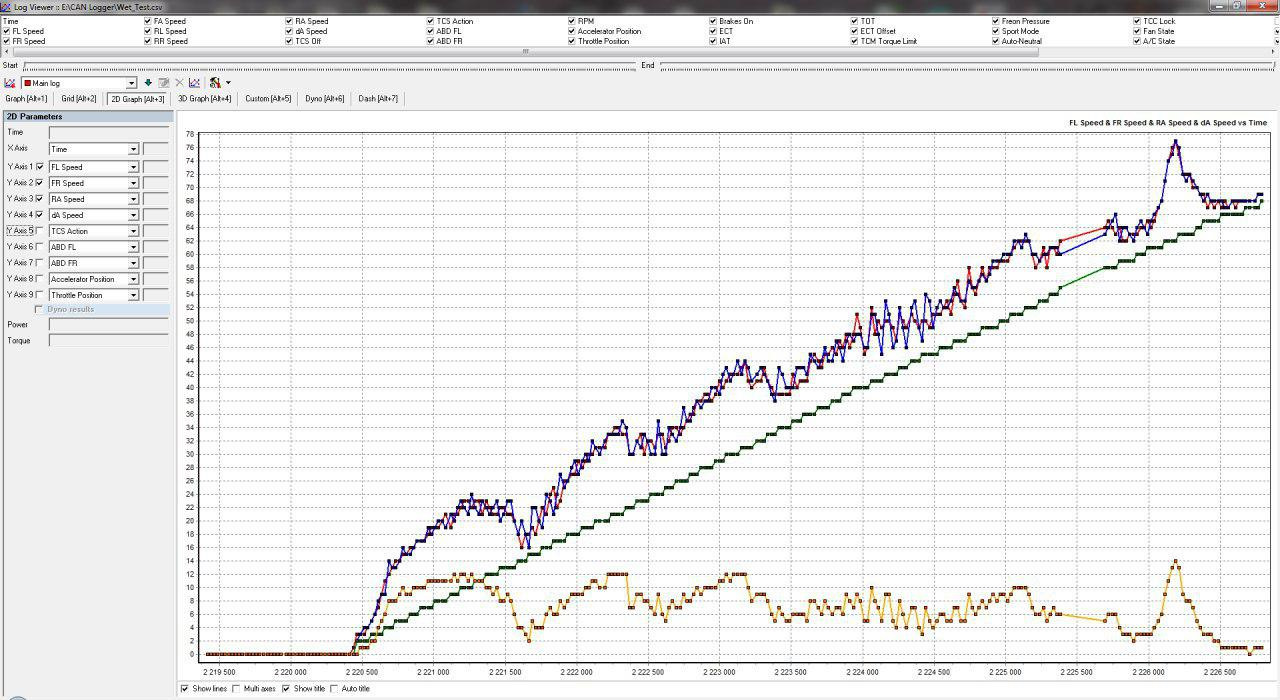
Пока выходит примерно так :
Для начала нужно донастроить сам мотор, а затем уж настраивать TC.
По ощущения — ну это просто спасение — старт плавный с контролируемой пробуксовкой- ощущение как с резинки выпустили, никакого долбления в отсечку при выходе на буст.
В общем я безмерно доволен. Спасибо ОГРОМНОЕ разработчику!




Комментарии 15
Так в стоке антибукс хорошо себя ведет
В стоке мотроник М1.5.5 стоит который никуда не едет в принципе.
Симтек у меня был…очень был доволен работой антибукса,
Если по снегу- да наверно. На сухом он только душит разгон. Ибо он тупо закрывает эдз
Походу данный девайс реально нужен если механика, с автоматом я особо проблем не испытываю с дурным буксом передней оси.
Данный девайс нужен если попробуешь выдуть чуть больше 200 стандартных сил в стоке.
фиг его знает — сток 241 лошадь на автомате я не вижу проблем, резина 225 40 18
Я просто планирую около 400 -без него даже 4 передача будет в букс срывать.
👌
Очень интересная штука 🤔🤔🤔😊
Просто надоело, что машина на разгоне ведет себя как неуправляемый снаряд. А тут смело-нажал газ в пол и вперед.
Мне на задний привод думаю такой девайс не надо
Самоблок поставлю и усё. Мне надо боком чтоб машина ходила)))
Замудренный девайс) очень серьезный подход
Это необходимо только для января- штатный мозг все и так умеет.
Я мало, что понял, но если это работает, это круто! Вопрос конечно, это работает под январем только или на штатный мозг с кан шиной тоже встанет?